[](https://crates.io/crates/bevy_flowfield_tiles_plugin)
[](https://docs.rs/bevy_flowfield_tiles_plugin)
[](https://github.com/blondeburrito/bevy_flowfield_tiles_plugin#license)


# bevy_flowfield_tiles_plugin
Inspired by the work of [Elijah Emerson](https://www.gameaipro.com/GameAIPro/GameAIPro_Chapter23_Crowd_Pathfinding_and_Steering_Using_Flow_Field_Tiles.pdf) and with inspiration from [leifnode](https://leifnode.com/2013/12/flow-field-pathfinding/) and [jdxdev](https://www.jdxdev.com/blog/2020/05/03/flowfields/) this is an attempt to implement the data structures and logic required to generate a Flowfield representation of a world which can be used to pathfind movable actors.
| bevy | bevy_flowfield_tiles_plugin |
|------|-----------------------------|
| 0.14 | 0.10 - 0.11 |
| 0.13 | 0.7 - 0.9 |
| 0.12 | 0.5 - 0.6 |
| 0.11 | 0.1 - 0.4 |
# Table of Contents
1. [Intro](#intro)
1. [Useful Definitions](#useful-definitions)
1. [Design/Process](#designprocess)
1. [Usage](#usage)
1. [Features](#features)
1. [Performance](#performance)
1. [License](#license)
## Intro
Pathfinding in games can take different forms and those forms have certain benefits aligned with the type of game they are being applied to. Generally people run across:
* Way-point Graph - points in space linked together, very strict structure, an actor will move from one way-point to another. Great for games played on a small grid where movement needs to be restricted to precise lines, will be cumbersome when multiple actors are sharing a path - particularly when actors have some kind of collision system in place
* NavMesh - a walkable surface generated from the topology of meshes in a game world defining a valid area of movement. It allows for a range of dynamic movement within the confines of the mesh and is a natural evolution of the Way-point Graph
* FlowField Tiles - a means of handling crowd and flocking behaviour by generating a flow field (vector field) describing how an actor flows across a world. A large number of actors can flow in unison to an endpoint while sharing the same pathing data structure - saving compute resources and time
For larger and larger environemnts with an increasing number of pathing actors it may be beneficial to adopt a FlowField based approach due to the data sharing and formation/group like movement it promotes. FlowField Tiles are complex, it's effectively akin to fluid mechanics, so this is an attempt to bring an agnostic implementation to the [Bevy](https://github.com/bevyengine/bevy/tree/main) game engine. My motivation for this is that I recently implemented a Way-point Graph for a prototype. In order to provide 'ok' actor movement it had to be made from 16 million data points. To prevent an actor from occasionally zig-zagging across the game world the granularity had to be boosted to 80 million data points to create a 'lifelike' impression of movement. That was just silly so I began looking into the history of pathfinding whereupon I stumbled across FlowField Tiles and decided to try and implement it with my favourite langauge and engine.
## Useful Definitions
* Sector - a slice of a game world composed of three 2D arrays called fields (`CostField`, `IntegrationField` and `FlowField`). A game world is effectively represented by a number of Sectors
* CostField - a 2D array describing how difficult it is to path through each cell of the array. It is always present in system memory
* Cost - how difficult/expensive it is to path somewhere, you could also call it weight, each cell of `CostField` has one of these
* Portal - a navigatable point which links one Sector to another to enable movement from one side of the world to another
* IntegrationField - a 2D array which uses the CostField to determine a cumulative cost of reaching the goal/endpoint (where you want to path to). This is an ephemeral field - it exists when required to calculate a `FlowField`
* FlowField - a 2D array built from the `IntegrationField` which decribes how an actor should move (flow) across the world
* FlowField Cache - a means of storing `FlowFields` allowing multiple actors to use and reuse them
* Ordinal - a direction based on traditional compass ordinals: N, NE, E, SE, S, SW, W, NW. Used for discovery of Sectors/field cells at various points within the algorithm
* Field cell - an element of a 2D array
* Goal - the target field cell an actor needs to path to
* Portal goal - a target point within a sector that allows an actor to transition to another sector, thus bringing it closer towards/to the goal
# Design/Process
To generate a set of navigation `FlowFields` the game world is divided into Sectors indexed by `(column, row)` and each Sector has 3 layers of data: `[CostField, IntegrationField, Flowfield]`. Each layer aids the next in building out a path. A concept of `Portals` is used to connect Sectors together.
## Sector
Click to expand!
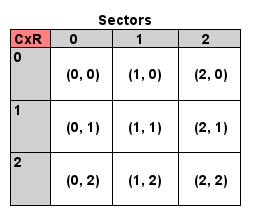
For a 3-dimensional world the `x-z` (`x-y` in 2d) plane defines the number of Sectors used to represent it with a scale factor called `sector_resolution`. This means that a for a `(30, 30)` world with a resolution of `10` there would be `3x3` Sectors representing it - this implies that a single sector has relative dimensions of `(10, 10)` and a single field cell within a sector represents a `1x1` unit area. Each Sector has an associated unqiue ID taken as its position: `(column, row)`.
Likewise for a `(300, 550)` resolution `10` world you'll be looking at `30` columns and `55` rows. The advantage of dividing a world into Sectors (as opposed to treating the whole world as a giant `Flowfield`) is that the work in generating a path can be split into multiple operations and only touch certain sectors. Say for the `(300, 550)` world you do treat it as a single set of fields - when calculating a path you could potentially have to calculate the Flowfield values for `165,000` field cells. Splitting it into sectors may mean that your path only takes you through 20 sectors, thereby only requiring `2,000` `Flowfield` field cells to be calculated.
## CostField
Click to expand!
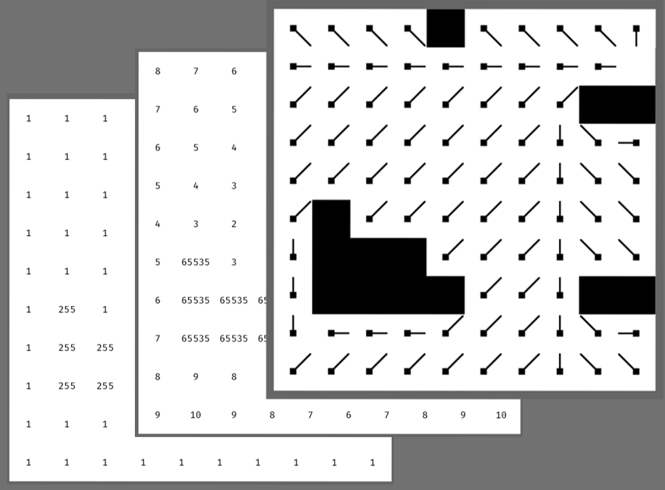
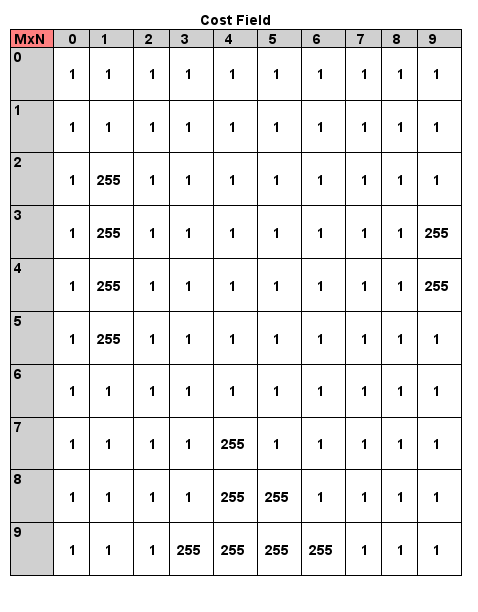
A `CostField` is an `MxN` 2D array of 8-bit values, by default this is always a `10x10` array. The values indicate the `cost` of navigating through that cell of the field. A value of `1` is the default and indicates the easiest `cost`, and a value of `255` is a special value used to indicate that the field cell is impassable - this could be used to indicate a wall or obstacle. All other values from `2-254` represent increasing cost, for instance a slope or difficult terrain such as a marsh. The idea is that the pathfinding calculations will favour cells with a smaller value before any others.
At runtime the `CostField` is generated for each Sector with the default value - although with the feature `ron` it is possible to load the fields from disk, or with the feature `heightmap` a greyscale png/jpeg can be used to seed the fields. See the [Usage](#usage) section below for details on updating the `CostFields` during an inital pass (i.e when loading a level) and tweaking it during gameplay for a world which dynamically evolves with obstacles (flipping a cell to to a higher cost or an impassable `255` when something like a wall is placed or the ground splits into a fissure).
This array is used to generate the `IntegrationField` when requesting a navigatable path.
## Portals
Click to expand!
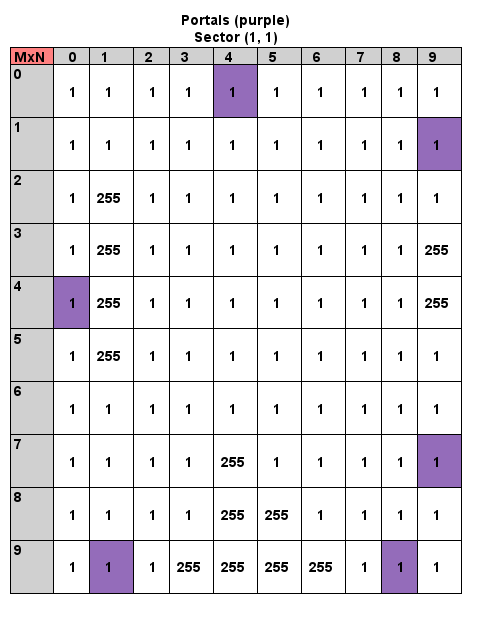
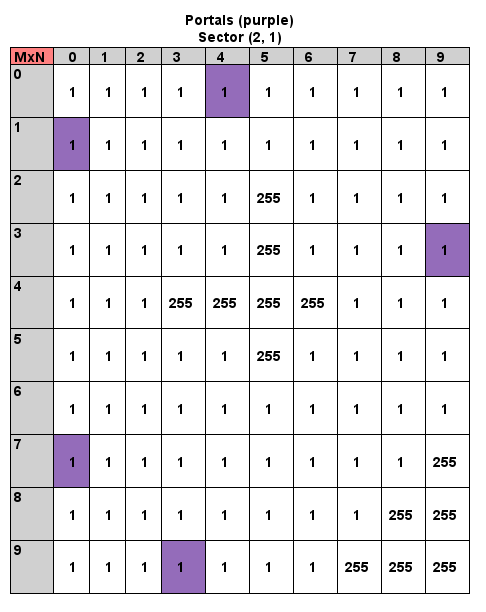
Each Sector has up to 4 boundaries with neighbouring Sectors (fewer when the sector is in a corner or along the edge of the game world). Each boundary can contain Portals which indicate a navigatable point from the current Sector to a neighbour. Portals serve a dual purpose, one of which is to provide responsiveness - `FlowFields` may take time to generate so when an actor needs to move a quick A* pathing query can produce an inital path route based on moving from one Portal to another and they can start moving in the general direction to the goal/target/endpoint. Once the `FlowFields` have been built the actor can switch to using them for granular navigation instead.
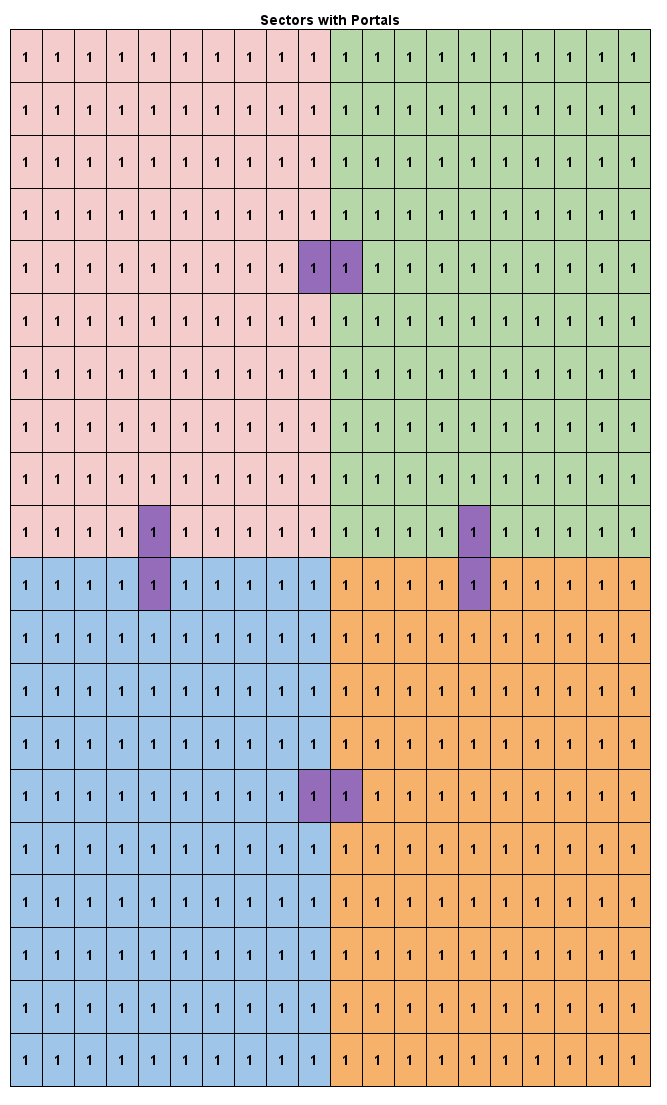
The following sectors are located away from any edges of the world which means each boundary can have Portals (the purple cells):
A Portal is generated at the midpoint of a boundary - in situations where the `CostField` contains `255` costs along the edge then multiple Portals may be generated at the midpoint of each valid pathable segment along the boundary and this is propagated to neighbouring Sectors so that every Portal has a neighbour buddy (as evident in the right hand Sector above, `S(1, 1)` portal `(9, 1)` allows movement into `S(2, 1)` portal `(0, 1)`, even though `S(2, 1)` has a whole boundary that appears completely pathable).
On a larger scale (but still small) and for the simplist `CostField` available, a `2x2` Sector grid produces predictable boundary Portals.
### Portal Graph
For finding a path from one Sector to another at a Portal level all Sector Portals are recorded within a data strucutre known as `PortalGraph`. The Portals are stored as Nodes and Edges are created between them to represent traversable paths, it gets built in three stages:
1. For all Portals add a graph `node`
2. For each sector create `edges` (pathable routes) to and from each Portal `node` - effectively create internal walkable routes of each sector
3. Create `edges` across the Portal `node` on all sector boundaries (walkable route from one sector to another)
This allows the graph to be queried with a `source` sector and a `target` sector and a list of Portals are returned which can be pathed. When a `CostField` is changed this triggers the regeneration of the sector Portals for the region that `CostField` resides in (and its neighbours to ensure homogenous boundaries) and the graph is updated with any new Portals `nodes` and the old ones are removed.
## IntegrationField
Click to expand!
An `IntegrationField` is an `MxN` 2D array of 32-bit values. It uses the `CostField` to produce a cumulative cost to reach the end goal/target. It's an ephemeral field, as in it gets built for a required sector and then consumed by the `FlowField` calculation. The first 16-bits of each field cell value are used for a cost measurement while the second 16-bits are used as flags to indicate certain properties of a cell. The flags are classified as:
* INT_BITS_LOS - indicates Line Of Sight from the cell to the goal cell
* INT_BITS_GOAL - indicates the cell is the goal
* INT_BITS_CORNER - indicates a point where Line Of Sight may be broken and is used to discover which cells should be marked as `INT_BITS_WAVE_BLOCKED`
* INT_BITS_WAVE_BLOCKED - marks cells to prevent Line Of Sight from being propagated around corners
* INT_BITS_PORTAL - marks cells that are portals between sectors
* INT_BITS_IMPASSABLE - marks a cell that cannot be pathed through
When a new route needs to be processed the first 16-bits of the field values are set to `u16::MAX` and the field cell containing the goal is set to `0`. Any cells which are impassable in the `CostField` are marked in the `IntegrationField` with their second 16-bits as `INT_BITS_IMPASSABLE`.
The `IntegrationField` is built from a number of passes:
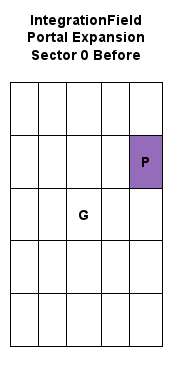
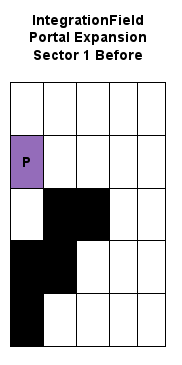
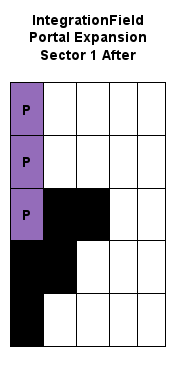
### 1. Portal Expansion
A Portal represents the midpoint of a traversable sector boundary, when generating the field we expand the portals to cover their entire segment - this increases efficiency so that an actor can more directly approach its goal rather than zig-zagging to portal boundary points.
Note that portals are only expanded to field cells if they are pathable from both neighbouring sectors, a neighbour that has impassable cells will shorten the pathable segemnt.
### 2. Line Of Sight Pass
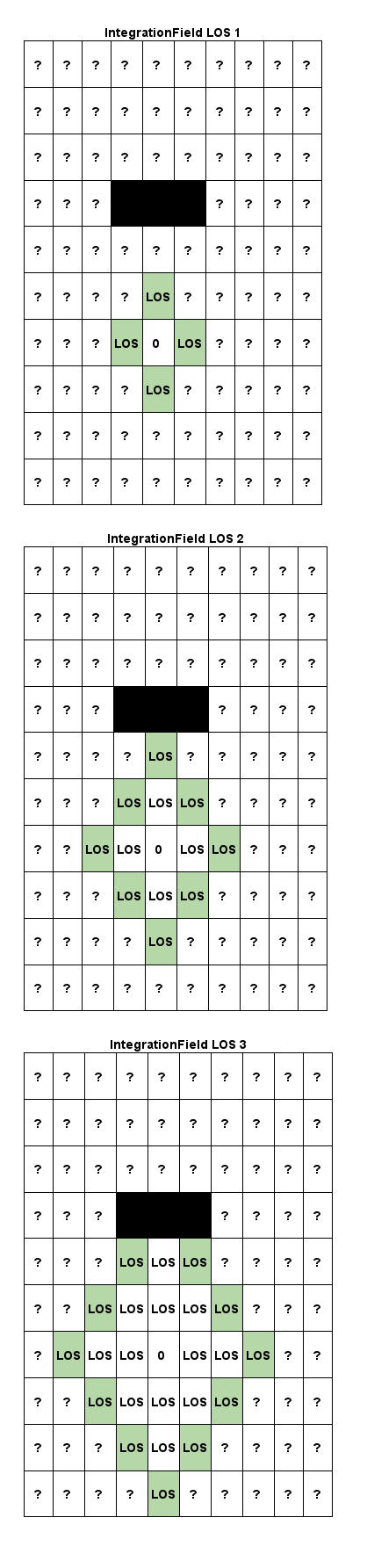
In order to reduce needless pathfinding near the goal a Line Of Sight (LOS) pass is performed from the goal Sector. The idea being that if an actor moves into a field cell that has LOS then it no longer needs to follow the FlowFields and can instead directly path to the goal.
The LOS phase begins as a wavefront from the goal that interrogates the adjacent neighbouring field cells. If an adjacent cell is not marked as impasssable then it must have LOS to the goal and the value of the cell receives a wavefront cost plus the LOS bit flag. The wavefront then expands (whereby the wavefront cost increments by 1) to interrogate the adjacent cells of the neighbours and repeats until the wavefront cannot propagate any further.
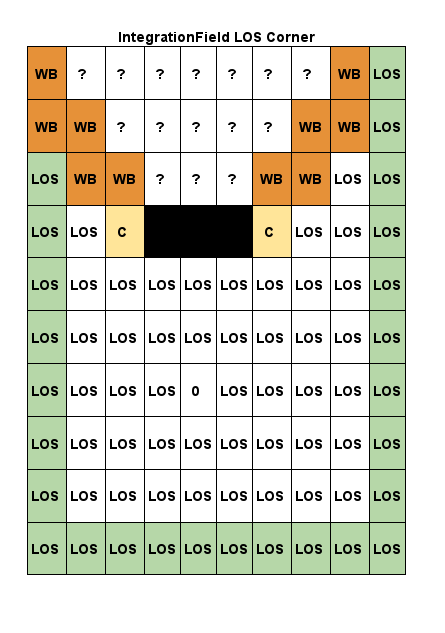
As the wavefront expands it may encounter an impassable field cell (a block box in the diagrams). This causes two things to happen:
First, wavefront expansion cannot continue in the direction of the impassable field cell so it is removed from being a candidate in the next round of wavefront propagation.
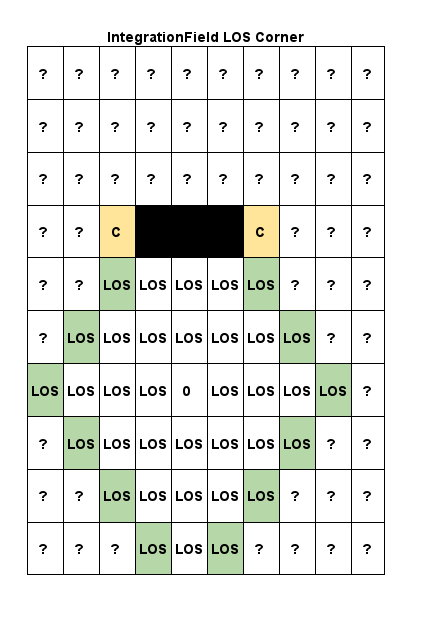
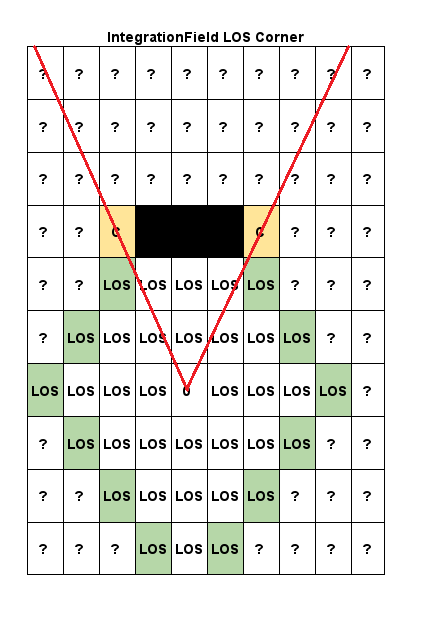
Second, if there is a vacant field cell next to the impassable field cell then this indicates a Corner. A Corner means that LOS will be blocked in a given direction and the Corner is recorded for stage 3, the integrated cost calculation.
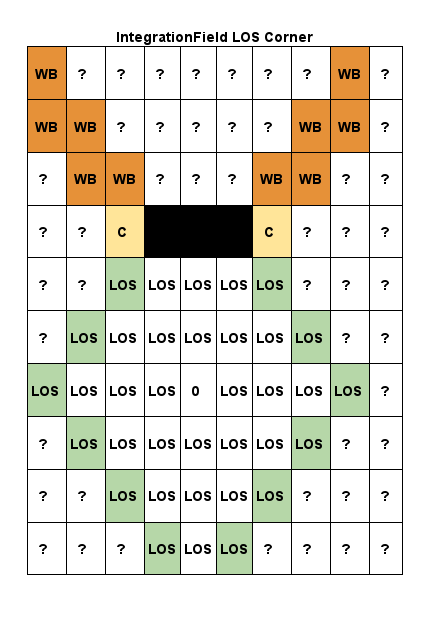
By taking a vector from the starting goal to the corner we can then extend this vector to calculate what field cells lie along a line. The field cells on this line are stored as corners and are updated with the flag for WavefrontBlocked. Meaning that as LOS expands and propagates if a WavefrontBlocked cell is encountered then the cell is removed as a candidate in further LOS porpagation. This ensures that LOS cannot flow around impassable areas.
Any available LOS propagation continues until all possible cells are exhausted:
Once the wavefront has exhausted expansion from either hitting the sector boundaries or from impassable cells/corners we can then calculate the actual integrated cost of the field.
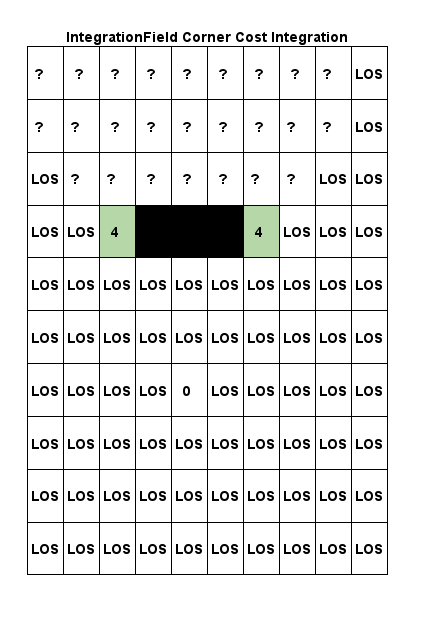
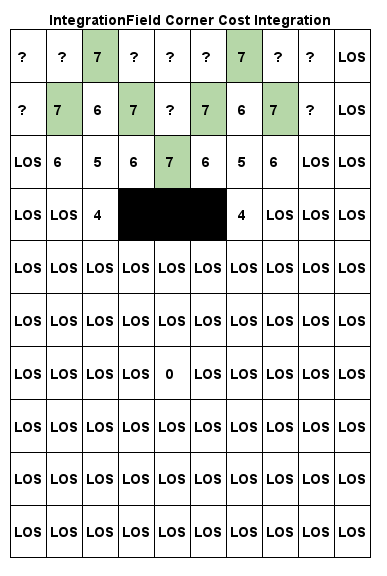
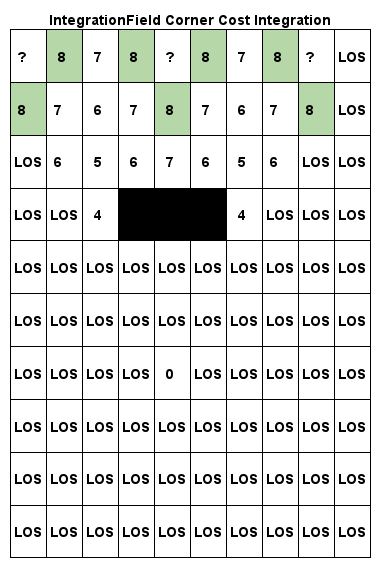
### 3. Integrated Cost Calculation
From the Corners of an `IntegrationField` recorded previously we start a new series of wavefronts that radiate from the corners considering any adjacent field cells that have not been marked as LOS or impassable.
To calculate the cost of the cells in the field:
1. The valid ordinal neighbours of the corners are determined (one, none or many of North, East, South, West)
2. For each ordinal field cell lookup their `CostField` value
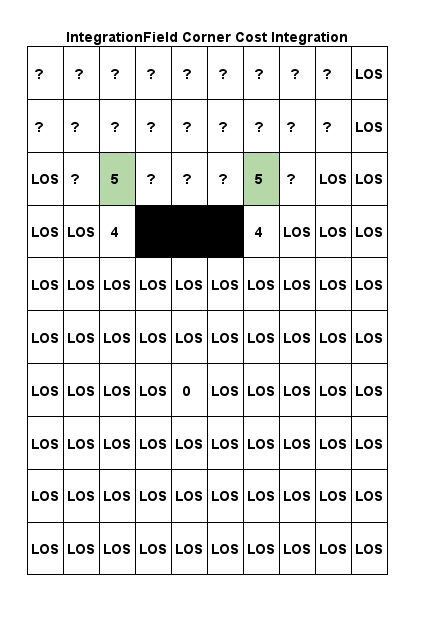
3. Add the `CostField` cost to the `IntegrationFields` cost of the current cell (at the corner the wavefront cost assigned was 4, assuming the `CostField` value of the adjacent cell is `1` then the integrated cost becomes `5`)
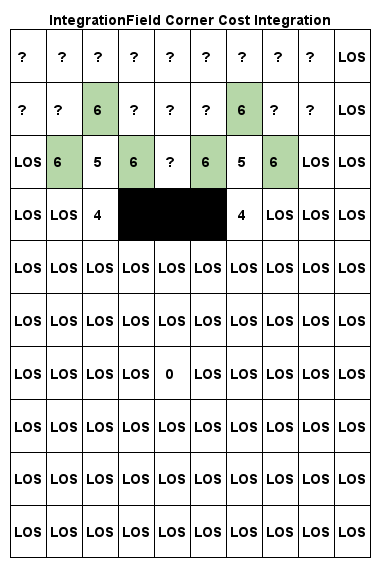
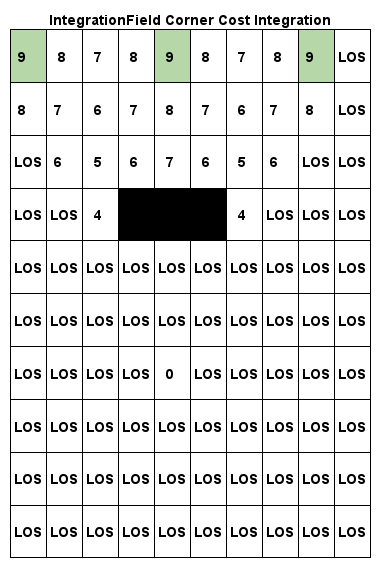
4. Wavefront propagates to the next neighbours, find their ordinals and repeat adding their cost value to to the current cells integration cost to produce their cumulative integration cost, and repeat until the entire field is done
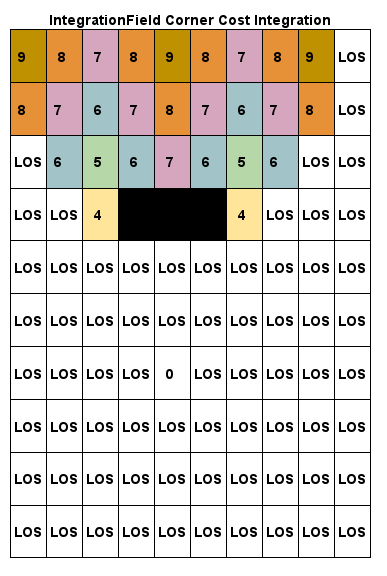
The end result effectively produces a gradient of high numbers to low numbers, a flow of sorts.
For Sectors other than the goal the process is effectively the same where boundary portals are treated as corners and wave propagation exapaned.
NB: the following diagrams use smaller sector sizes and exclude LOS but demonstrate how integrated cost is accumulated and creates a gradient from portal to portal
From the `PortalGraph` we can get a path of `Portals` to guide the actor over several sectors to the desired sector, the `IntegrationField` of the goal sector has been calculated so next we "hop" through the boundary `Portals` working backwards from the goal sector to the actor sector (Portals are denoted as a purple shade) to produce a series of `IntegrationFields` for the chaining Sectors describing the flow movement.
In terms of pathfinding the actor will favour flowing "downhill". From the position of the actor and looking at its field cell neighbours a smalller value in that sectors `IntegrationField` means a more favourable point for reaching the end goal, going from smaller to smaller values, basically a gradient flowing downhill to the destination.
This informs the basis of a `FlowField`.
As an example for a `30x30` world (manually calculated), goal at `0` with an actor at `A`, an `IntegrationField` set interrogating all sector `Portals` may produce a set of fields looking similar to:
Notice the cool waves that propagate out from the goal!
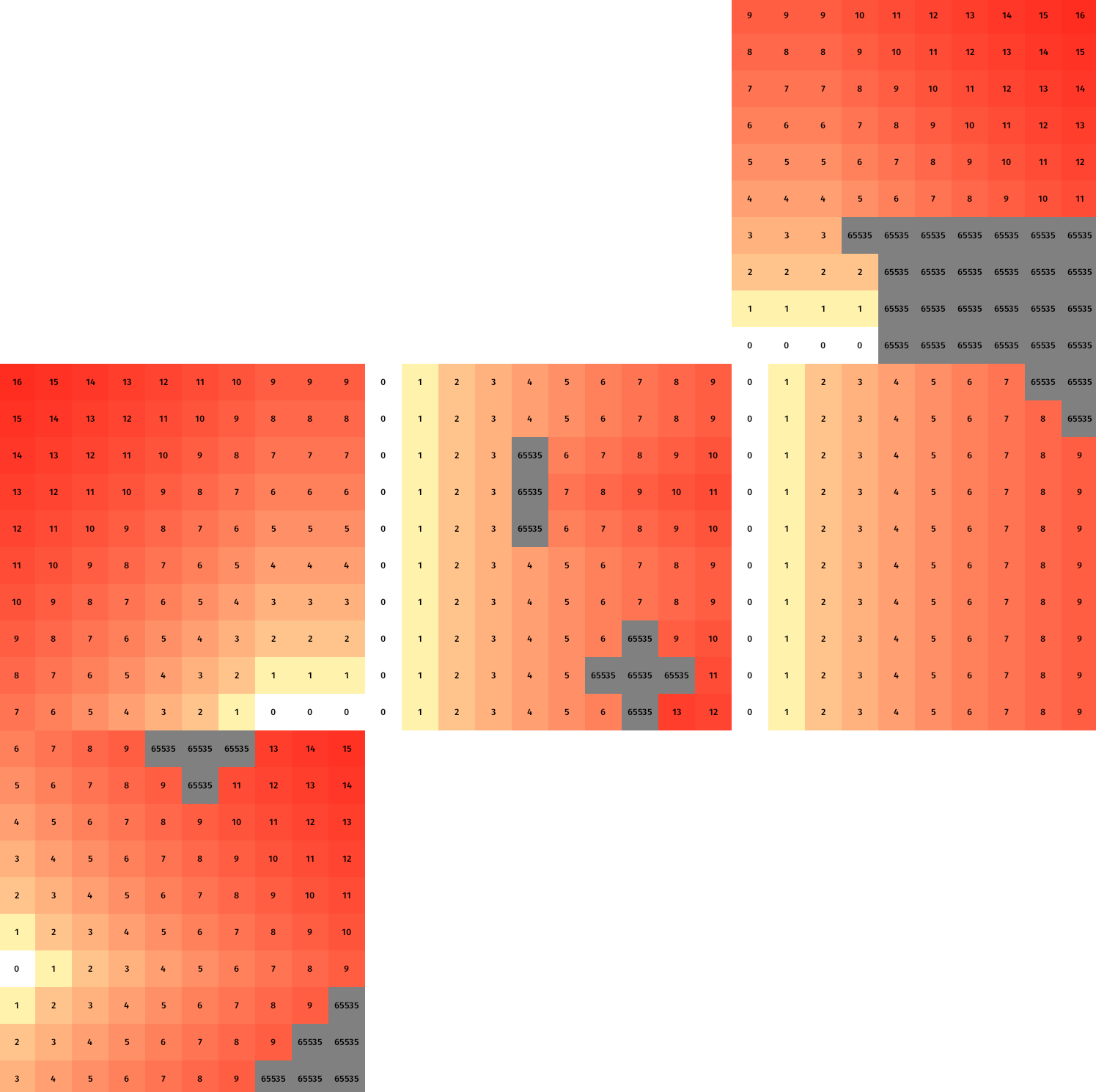
Generating the fields for this path programmatically leads to:
From the `IntegrationFields` we can now build the final set of fields - `FlowFields`
## FlowField
Click to expand!
A `FlowField` is an `MxN` 2D array of 8-bit values built from a Sectors `IntegrationField`. The first 4 bits of the value correspond to one of eight ordinal movement directions an actor can take (plus a zero vector when impassable) and the second 4 bits correspond to flags which should be used by a character controller/steering pipeline to follow a path.
The directional bits are defined as:
* `0b0000_0001` - North
* `0b0000_0010` - East
* `0b0000_0100` - South
* `0b0000_1000` - West
* `0b0000_0011` - North-East
* `0b0000_0110` - South-East
* `0b0000_1100` - South-West
* `0b0000_1001` - North-West
* `0b0000_0000` - zero vector, represents impassable cells
* `0b0000_1111` - default on `FlowField` initialisation, is always replaced by other values
The assistant flags are defined as:
* `0b0001_0000` - pathable
* `0b0010_0000` - has line-of-sight to goal, an actor no longer needs to follow the field, it can move in a straight line to the goal. This avoids calculating field values that aren't actually needed and once an actor enters a cell with this flag then they no longer need to spend time looking up a `FlowField``
* `0b0100_0000` - indicates the goal
* `0b1000_0000` - indicates a portal goal leading to the next sector
So a field cell in the `FlowField` with a value of `0b0001_0110` means the actor should flow in the South-East direction. In terms of use don't worry about understanding these bit values too much, the [Usage](#usage) section shows the helpers for interpreting the values of the `FlowField` to steer an actor.
Using the `IntegrationFields` generated before, with an actor in the top right trying to reach the bottom left, we now generate the `FlowFields`:
The thinner porition of each cell icon indicates the flow direction. The actor runs along the flow lines leading to the goal. This means for a group of actors they will flow towards the goal with a formation-like behaviour along the flow lines.
## Route & FlowField Cache
Click to expand!
To enable actors to reuse `FlowFields` (thus avoiding repeated calculations) a pair of caches are used to store pathing data:
1. Route Cache - when an actor requests to go somewhere a high-level route is generated from describing the overall series of sector-portals to traverse (`PortalGraph` A*). If a `FlowField` hasn't yet been calculated then an actor can use the `route_cache` as a fallback to gain a generalist direction they should start moving in. Once the `FlowFields` have been built they can swap over to using those more granular paths. TODO: ~~Additionally changes to `CostFields` can change portal positions and the real best path, so `FlowFields` are regenerated for the relevant sectors that `CostFields` have modified and during the regeneration steps an actor can once again use the high-level route as the fallback~~
1. Field Cache - for every sector-to-portal part of a route a `FlowField` is built and stored in the cache. Actors can poll this cache to get the true flow direction to their goal. A Character Controller/Steering Pipeline is responsible for interpreting the values of the `FlowField` to produce movement - while this plugin includes a Steering Pipeline the reality is that every game has it's own quirks and desires for movement so you will most likely want to build your own Pipeline. The real point of this plugin is to encapulsate the data structures and logic to make a `FlowField` which an Actor can then read through it's own implementation.
Note that the data stored in the caches is timestamped - if a record lives longer than 15 minutes then it is purged to reduce size and improve lookup efficiency. When implemnting a steering pipeline/character controller to interpret the `FlowFields` you may need to account for these old routes/paths expiring.
## Actor Sizes
Click to expand!
In a simulation you may have actors of different sizes and a gap between impassable walls, consider these purple actors:
The smaller actor on the left can evidently pass through the gap between the impassable terrain. On the right however the actor is much larger and as such when processing a `PathRequest` only routes with suitable clearance should be considered (otherwise with a collision system in place it'd just bump into the walls to the side and never make it through).
To handle this the overall `MapDimenions` component which defines the sizing of the various fields contains an `actor_scale` parameter. This scaling is determined by the actor size and unit-size of a cell within a field. For instance a Sector with pixel dimensions of `640x640` means that each cell in the `(m, n) -> (10, 10)` fields represents a pixel area of `64x64`, if an actor is larger than `64` pixels in width then a ratio between actor size and cell size is applied to 'grow' impassable cells to close off gaps that would be too small for the actor to path through.
In terms of what an actor 'sees' after requesting a route, the smaller actor on the left can path through the gap whereas the larger actor on the right would search for an alternate route:
In a game with actors of multiple sizes you will want to create distinct entities from `FlowFieldTilesBundle` where each is configured to handle a certain size of actor.
```rust
#[derive(Component)]
struct ActorSmall
#[derive(Component)]
struct ActorLarge
fn setup () {
let map_length = 1920;
let map_depth = 1920;
let sector_resolution = 640;
let actor_size_small = 16.0;
cmds.spawn(FlowFieldTilesBundle::new(
map_length,
map_depth,
sector_resolution,
actor_size_small
)).insert(ActorSmall);
let actor_size_large = 78.0;
cmds.spawn(FlowFieldTilesBundle::new(
map_length,
map_depth,
sector_resolution,
actor_size_large
)).insert(ActorLarge);
}
fn system_navigation_small_actors(
actor_q: Query<&Actor, With>,
field_q: Query<&FlowCache, With>
) {/* handling movement etc */}
fn system_navigation_large_actors(
actor_q: Query<&Actor, With>,
field_q: Query<&FlowCache, With>
) {/* handling movement etc */}
```
# Usage
Update your `Cargo.toml` and add any features you require, to actually interface with calculated fields you should enable either `2d` or `3d` depending on the coordinate system of your world:
```toml
[dependencies]
bevy_flowfield_tiles_plugin = { version = "0.x", features = ["3d"] }
```
## Default
Add the plugin to your app:
```rust
use bevy_flowfield_tiles_plugin::prelude::*;
fn main() {
App::new()
// ... snip
.add_plugins(FlowFieldTilesPlugin)
// ... snip
}
```
## Custom System Setup and Constraints
In your own simulation you may well be using custom schedules or stages to control logic execution, the plugin as is sets all the logic to run as part of the `PreUpdate` phase of the main Bevy schedule. To implement the logic into your own scheduling disect the contents of [`plugin/mod.rs`](https://github.com/BlondeBurrito/bevy_flowfield_tiles_plugin/blob/main/src/plugin/mod.rs) - note that certain systems have been `chained` together and they must remain chained for accurate paths to be computed.
## Initialising Data
Next it's time to spawn the bundle entity configured to your world size (looking through the examples will give some pointers on this too).
The size and resolution of the world need to be known at initialisation and three values are required:
* `map_length` - in 2d this refers to the pixel `x` size of the world. In 3d this is simply the `x` size
* `map_depth` - in 2d this refers to the pixel `y` size of the world. In 3d this is the `z` size
* `sector_resolution` - determines the numder of sectors by taking each size and dividing them by this value. In 2d this is basically the pixel length of each sector side and likewise for 3d it's the length of each sector side using whatever unit of measurement you've defined (for ease of use I go with a unit of `x` is 1 meter and a unit of `z` is one meter)
* 2d: a world of pixel size `(1920, 1080)` with a resolution of `40` will produce 48x27 sectors. Another way of looking at this could be based on the idea of having a world made of sprites where each sprite corresponds to where a `FieldCell` would be. If these regular sized sprites have a pixel length and height of `64` and your world is made from a `20x20` grid of these sprites then you can calcualte what the size is. `map_length` would be your sprite length multiplied by the number sprites along the `x` axis of the world, i.e `64 * 20 = 1280`. `map_depth` follows a likewise calculation `64 * 20 = 1280`. As for resolution it will depend on how granular you want, in this example case a `10x10` `CostField` is supposed to overlay an exact number of sprites so we use the sprite size to find the resolution `64 * 10 = 640`.
* 3d: a world of size `(780x440)` with resolution `10` produces `78x44` sectors. Given that fields are `10x10` arrays this translates to a single `FieldCell` representing a `1x1` unit area
Within a system somewhere you can spawn the Bundle:
```rust
fn my_system(mut cmds: Commands) {
let map_length = 1920;
let map_depth = 1920;
let sector_resolution = 640;
let actor_size = 16.0;
cmds.spawn(FlowFieldTilesBundle::new(map_length, map_depth, sector_resolution, actor_size));
}
```
Note that this will initialise all the `CostFields` representing the world with cell values of `1`. Meaning everywhere is pathable, in all likihood you'll then need to seed the fields with true values.
In 3d you could consider making a raycast to the centre of where each FieldCell would be and use something like the `y` position of the ray hit to determine if something is passable or not and then flip the value of that particular `FieldCell` (`EventUpdateCostfieldsCell` can be used to queue a cost change).
Most likely for 2d or more complex 3d scenarios you'll probably want to enable either the `ron`, `csv` or `heightmap` feature which allows for creating a `FlowFieldTilesBundle` with inital `CostFields` from a `.ron` file, a collection of `.csv` or a greyscale png/jpeg where pixel colour channels are translated into costs, the examples showcase this in more detail.
## Path Request
When it comes to interacting with the algorithm this is based on an event to be emitted when a movable actor needs a path:
```rust
struct EventPathRequest {
/// The starting sector of the request
source_sector: SectorID,
/// The starting field cell of the starting sector
source_field_cell: FieldCell,
/// The sector to try and find a path to
target_sector: SectorID,
/// The field cell in the target sector to find a path to
target_goal: FieldCell,
}
```
Each parameter can be determined by querying the `MapDimension` component of the Bundle with the starting and end `Transform::translation` of actor position and target position.
Using some example components to track and label an Actor:
```rust
/// Enables easy querying of Actor entities
#[derive(Component)]
struct Actor;
/// Consumed by an Actor steering pipeline to produce movement
#[derive(Default, Component)]
struct Pathing {
target_position: Option,
metadata: Option,
portal_route: Option>,
has_los: bool,
}
```
We can then do something like process mouse clicks assign an actor a `target_position` (in 3d use the methods ending in xyz instead):
```rust
fn user_input(
mouse_button_input: Res>,
windows: Query<&Window, With>,
camera_q: Query<(&Camera, &GlobalTransform)>,
dimensions_q: Query<&MapDimensions>,
mut actor_q: Query<&mut Pathing, With>,
) {
if mouse_button_input.just_released(MouseButton::Right) {
// get 2d world positionn of cursor
let (camera, camera_transform) = camera_q.single();
let window = windows.single();
if let Some(world_position) = window
.cursor_position()
.and_then(|cursor| camera.viewport_to_world(camera_transform, cursor))
.map(|ray| ray.origin.truncate())
{
let map_dimensions = dimensions_q.get_single().unwrap();
if map_dimensions
.get_sector_and_field_cell_from_xy(world_position)
.is_some()
{
let mut pathing = actor_q.get_single_mut().unwrap();
// update the actor pathing
pathing.target_position = Some(world_position);
pathing.metadata = None;
pathing.portal_route = None;
pathing.has_los = false;
} else {
error!("Cursor out of bounds");
}
}
}
}
```
The actor can then query the `RouteCache` to obtain a route - or if one doesn't exist it can emit a request to have a route generated.
```rust
fn get_or_request_route(
route_q: Query<(&RouteCache, &MapDimensions)>,
mut actor_q: Query<(&Transform, &mut Pathing), With>,
mut event: EventWriter,
) {
let (route_cahe, map_dimensions) = route_q.get_single().unwrap();
for (tform, mut pathing) in &mut actor_q {
if let Some(target) = pathing.target_position {
// actor has no route, look one up or request one
if pathing.portal_route.is_none() {
if let Some((source_sector, source_field)) =
map_dimensions.get_sector_and_field_cell_from_xy(tform.translation.truncate())
{
if let Some((target_sector, goal_id)) =
map_dimensions.get_sector_and_field_cell_from_xy(target)
{
// if a route is calculated get it
if let Some((metadata, route)) = route_cahe.get_route_with_metadata(
source_sector,
source_field,
target_sector,
goal_id,
) {
pathing.metadata = Some(*metadata);
pathing.portal_route = Some(route.clone());
} else {
// request a route
event.send(EventPathRequest::new(
source_sector,
source_field,
target_sector,
goal_id,
));
}
}
}
}
}
}
}
```
And once the `FlowFields` have been built they can query the `FlowFieldCache` instead and apply/queue up some kind of movement.
Note this example is very basic as it only handles a single actor, in an application you'd devise your own handling system:
```rust
const SPEED: f32 = 64.0;
fn actor_steering(
mut actor_q: Query<(&mut LinearVelocity, &mut Transform, &mut Pathing), With>,
flow_cache_q: Query<(&FlowFieldCache, &MapDimensions)>,
time_step: Res
 # bevy_flowfield_tiles_plugin
Inspired by the work of [Elijah Emerson](https://www.gameaipro.com/GameAIPro/GameAIPro_Chapter23_Crowd_Pathfinding_and_Steering_Using_Flow_Field_Tiles.pdf) and with inspiration from [leifnode](https://leifnode.com/2013/12/flow-field-pathfinding/) and [jdxdev](https://www.jdxdev.com/blog/2020/05/03/flowfields/) this is an attempt to implement the data structures and logic required to generate a Flowfield representation of a world which can be used to pathfind movable actors.
| bevy | bevy_flowfield_tiles_plugin |
|------|-----------------------------|
| 0.14 | 0.10 - 0.11 |
| 0.13 | 0.7 - 0.9 |
| 0.12 | 0.5 - 0.6 |
| 0.11 | 0.1 - 0.4 |
# bevy_flowfield_tiles_plugin
Inspired by the work of [Elijah Emerson](https://www.gameaipro.com/GameAIPro/GameAIPro_Chapter23_Crowd_Pathfinding_and_Steering_Using_Flow_Field_Tiles.pdf) and with inspiration from [leifnode](https://leifnode.com/2013/12/flow-field-pathfinding/) and [jdxdev](https://www.jdxdev.com/blog/2020/05/03/flowfields/) this is an attempt to implement the data structures and logic required to generate a Flowfield representation of a world which can be used to pathfind movable actors.
| bevy | bevy_flowfield_tiles_plugin |
|------|-----------------------------|
| 0.14 | 0.10 - 0.11 |
| 0.13 | 0.7 - 0.9 |
| 0.12 | 0.5 - 0.6 |
| 0.11 | 0.1 - 0.4 |
 # Table of Contents
1. [Intro](#intro)
1. [Useful Definitions](#useful-definitions)
1. [Design/Process](#designprocess)
1. [Usage](#usage)
1. [Features](#features)
1. [Performance](#performance)
1. [License](#license)
## Intro
Pathfinding in games can take different forms and those forms have certain benefits aligned with the type of game they are being applied to. Generally people run across:
* Way-point Graph - points in space linked together, very strict structure, an actor will move from one way-point to another. Great for games played on a small grid where movement needs to be restricted to precise lines, will be cumbersome when multiple actors are sharing a path - particularly when actors have some kind of collision system in place
* NavMesh - a walkable surface generated from the topology of meshes in a game world defining a valid area of movement. It allows for a range of dynamic movement within the confines of the mesh and is a natural evolution of the Way-point Graph
* FlowField Tiles - a means of handling crowd and flocking behaviour by generating a flow field (vector field) describing how an actor flows across a world. A large number of actors can flow in unison to an endpoint while sharing the same pathing data structure - saving compute resources and time
For larger and larger environemnts with an increasing number of pathing actors it may be beneficial to adopt a FlowField based approach due to the data sharing and formation/group like movement it promotes. FlowField Tiles are complex, it's effectively akin to fluid mechanics, so this is an attempt to bring an agnostic implementation to the [Bevy](https://github.com/bevyengine/bevy/tree/main) game engine. My motivation for this is that I recently implemented a Way-point Graph for a prototype. In order to provide 'ok' actor movement it had to be made from 16 million data points. To prevent an actor from occasionally zig-zagging across the game world the granularity had to be boosted to 80 million data points to create a 'lifelike' impression of movement. That was just silly so I began looking into the history of pathfinding whereupon I stumbled across FlowField Tiles and decided to try and implement it with my favourite langauge and engine.
## Useful Definitions
* Sector - a slice of a game world composed of three 2D arrays called fields (`CostField`, `IntegrationField` and `FlowField`). A game world is effectively represented by a number of Sectors
* CostField - a 2D array describing how difficult it is to path through each cell of the array. It is always present in system memory
* Cost - how difficult/expensive it is to path somewhere, you could also call it weight, each cell of `CostField` has one of these
* Portal - a navigatable point which links one Sector to another to enable movement from one side of the world to another
* IntegrationField - a 2D array which uses the CostField to determine a cumulative cost of reaching the goal/endpoint (where you want to path to). This is an ephemeral field - it exists when required to calculate a `FlowField`
* FlowField - a 2D array built from the `IntegrationField` which decribes how an actor should move (flow) across the world
* FlowField Cache - a means of storing `FlowFields` allowing multiple actors to use and reuse them
* Ordinal - a direction based on traditional compass ordinals: N, NE, E, SE, S, SW, W, NW. Used for discovery of Sectors/field cells at various points within the algorithm
* Field cell - an element of a 2D array
* Goal - the target field cell an actor needs to path to
* Portal goal - a target point within a sector that allows an actor to transition to another sector, thus bringing it closer towards/to the goal
# Design/Process
To generate a set of navigation `FlowFields` the game world is divided into Sectors indexed by `(column, row)` and each Sector has 3 layers of data: `[CostField, IntegrationField, Flowfield]`. Each layer aids the next in building out a path. A concept of `Portals` is used to connect Sectors together.
## Sector
# Table of Contents
1. [Intro](#intro)
1. [Useful Definitions](#useful-definitions)
1. [Design/Process](#designprocess)
1. [Usage](#usage)
1. [Features](#features)
1. [Performance](#performance)
1. [License](#license)
## Intro
Pathfinding in games can take different forms and those forms have certain benefits aligned with the type of game they are being applied to. Generally people run across:
* Way-point Graph - points in space linked together, very strict structure, an actor will move from one way-point to another. Great for games played on a small grid where movement needs to be restricted to precise lines, will be cumbersome when multiple actors are sharing a path - particularly when actors have some kind of collision system in place
* NavMesh - a walkable surface generated from the topology of meshes in a game world defining a valid area of movement. It allows for a range of dynamic movement within the confines of the mesh and is a natural evolution of the Way-point Graph
* FlowField Tiles - a means of handling crowd and flocking behaviour by generating a flow field (vector field) describing how an actor flows across a world. A large number of actors can flow in unison to an endpoint while sharing the same pathing data structure - saving compute resources and time
For larger and larger environemnts with an increasing number of pathing actors it may be beneficial to adopt a FlowField based approach due to the data sharing and formation/group like movement it promotes. FlowField Tiles are complex, it's effectively akin to fluid mechanics, so this is an attempt to bring an agnostic implementation to the [Bevy](https://github.com/bevyengine/bevy/tree/main) game engine. My motivation for this is that I recently implemented a Way-point Graph for a prototype. In order to provide 'ok' actor movement it had to be made from 16 million data points. To prevent an actor from occasionally zig-zagging across the game world the granularity had to be boosted to 80 million data points to create a 'lifelike' impression of movement. That was just silly so I began looking into the history of pathfinding whereupon I stumbled across FlowField Tiles and decided to try and implement it with my favourite langauge and engine.
## Useful Definitions
* Sector - a slice of a game world composed of three 2D arrays called fields (`CostField`, `IntegrationField` and `FlowField`). A game world is effectively represented by a number of Sectors
* CostField - a 2D array describing how difficult it is to path through each cell of the array. It is always present in system memory
* Cost - how difficult/expensive it is to path somewhere, you could also call it weight, each cell of `CostField` has one of these
* Portal - a navigatable point which links one Sector to another to enable movement from one side of the world to another
* IntegrationField - a 2D array which uses the CostField to determine a cumulative cost of reaching the goal/endpoint (where you want to path to). This is an ephemeral field - it exists when required to calculate a `FlowField`
* FlowField - a 2D array built from the `IntegrationField` which decribes how an actor should move (flow) across the world
* FlowField Cache - a means of storing `FlowFields` allowing multiple actors to use and reuse them
* Ordinal - a direction based on traditional compass ordinals: N, NE, E, SE, S, SW, W, NW. Used for discovery of Sectors/field cells at various points within the algorithm
* Field cell - an element of a 2D array
* Goal - the target field cell an actor needs to path to
* Portal goal - a target point within a sector that allows an actor to transition to another sector, thus bringing it closer towards/to the goal
# Design/Process
To generate a set of navigation `FlowFields` the game world is divided into Sectors indexed by `(column, row)` and each Sector has 3 layers of data: `[CostField, IntegrationField, Flowfield]`. Each layer aids the next in building out a path. A concept of `Portals` is used to connect Sectors together.
## Sector
 Likewise for a `(300, 550)` resolution `10` world you'll be looking at `30` columns and `55` rows. The advantage of dividing a world into Sectors (as opposed to treating the whole world as a giant `Flowfield`) is that the work in generating a path can be split into multiple operations and only touch certain sectors. Say for the `(300, 550)` world you do treat it as a single set of fields - when calculating a path you could potentially have to calculate the Flowfield values for `165,000` field cells. Splitting it into sectors may mean that your path only takes you through 20 sectors, thereby only requiring `2,000` `Flowfield` field cells to be calculated.
Likewise for a `(300, 550)` resolution `10` world you'll be looking at `30` columns and `55` rows. The advantage of dividing a world into Sectors (as opposed to treating the whole world as a giant `Flowfield`) is that the work in generating a path can be split into multiple operations and only touch certain sectors. Say for the `(300, 550)` world you do treat it as a single set of fields - when calculating a path you could potentially have to calculate the Flowfield values for `165,000` field cells. Splitting it into sectors may mean that your path only takes you through 20 sectors, thereby only requiring `2,000` `Flowfield` field cells to be calculated.
 At runtime the `CostField` is generated for each Sector with the default value - although with the feature `ron` it is possible to load the fields from disk, or with the feature `heightmap` a greyscale png/jpeg can be used to seed the fields. See the [Usage](#usage) section below for details on updating the `CostFields` during an inital pass (i.e when loading a level) and tweaking it during gameplay for a world which dynamically evolves with obstacles (flipping a cell to to a higher cost or an impassable `255` when something like a wall is placed or the ground splits into a fissure).
This array is used to generate the `IntegrationField` when requesting a navigatable path.
At runtime the `CostField` is generated for each Sector with the default value - although with the feature `ron` it is possible to load the fields from disk, or with the feature `heightmap` a greyscale png/jpeg can be used to seed the fields. See the [Usage](#usage) section below for details on updating the `CostFields` during an inital pass (i.e when loading a level) and tweaking it during gameplay for a world which dynamically evolves with obstacles (flipping a cell to to a higher cost or an impassable `255` when something like a wall is placed or the ground splits into a fissure).
This array is used to generate the `IntegrationField` when requesting a navigatable path.
 A Portal is generated at the midpoint of a boundary - in situations where the `CostField` contains `255` costs along the edge then multiple Portals may be generated at the midpoint of each valid pathable segment along the boundary and this is propagated to neighbouring Sectors so that every Portal has a neighbour buddy (as evident in the right hand Sector above, `S(1, 1)` portal `(9, 1)` allows movement into `S(2, 1)` portal `(0, 1)`, even though `S(2, 1)` has a whole boundary that appears completely pathable).
On a larger scale (but still small) and for the simplist `CostField` available, a `2x2` Sector grid produces predictable boundary Portals.
A Portal is generated at the midpoint of a boundary - in situations where the `CostField` contains `255` costs along the edge then multiple Portals may be generated at the midpoint of each valid pathable segment along the boundary and this is propagated to neighbouring Sectors so that every Portal has a neighbour buddy (as evident in the right hand Sector above, `S(1, 1)` portal `(9, 1)` allows movement into `S(2, 1)` portal `(0, 1)`, even though `S(2, 1)` has a whole boundary that appears completely pathable).
On a larger scale (but still small) and for the simplist `CostField` available, a `2x2` Sector grid produces predictable boundary Portals.
 ### Portal Graph
For finding a path from one Sector to another at a Portal level all Sector Portals are recorded within a data strucutre known as `PortalGraph`. The Portals are stored as Nodes and Edges are created between them to represent traversable paths, it gets built in three stages:
1. For all Portals add a graph `node`
2. For each sector create `edges` (pathable routes) to and from each Portal `node` - effectively create internal walkable routes of each sector
3. Create `edges` across the Portal `node` on all sector boundaries (walkable route from one sector to another)
This allows the graph to be queried with a `source` sector and a `target` sector and a list of Portals are returned which can be pathed. When a `CostField` is changed this triggers the regeneration of the sector Portals for the region that `CostField` resides in (and its neighbours to ensure homogenous boundaries) and the graph is updated with any new Portals `nodes` and the old ones are removed.
### Portal Graph
For finding a path from one Sector to another at a Portal level all Sector Portals are recorded within a data strucutre known as `PortalGraph`. The Portals are stored as Nodes and Edges are created between them to represent traversable paths, it gets built in three stages:
1. For all Portals add a graph `node`
2. For each sector create `edges` (pathable routes) to and from each Portal `node` - effectively create internal walkable routes of each sector
3. Create `edges` across the Portal `node` on all sector boundaries (walkable route from one sector to another)
This allows the graph to be queried with a `source` sector and a `target` sector and a list of Portals are returned which can be pathed. When a `CostField` is changed this triggers the regeneration of the sector Portals for the region that `CostField` resides in (and its neighbours to ensure homogenous boundaries) and the graph is updated with any new Portals `nodes` and the old ones are removed.
 Note that portals are only expanded to field cells if they are pathable from both neighbouring sectors, a neighbour that has impassable cells will shorten the pathable segemnt.
Note that portals are only expanded to field cells if they are pathable from both neighbouring sectors, a neighbour that has impassable cells will shorten the pathable segemnt.

 ### 2. Line Of Sight Pass
In order to reduce needless pathfinding near the goal a Line Of Sight (LOS) pass is performed from the goal Sector. The idea being that if an actor moves into a field cell that has LOS then it no longer needs to follow the FlowFields and can instead directly path to the goal.
The LOS phase begins as a wavefront from the goal that interrogates the adjacent neighbouring field cells. If an adjacent cell is not marked as impasssable then it must have LOS to the goal and the value of the cell receives a wavefront cost plus the LOS bit flag. The wavefront then expands (whereby the wavefront cost increments by 1) to interrogate the adjacent cells of the neighbours and repeats until the wavefront cannot propagate any further.
### 2. Line Of Sight Pass
In order to reduce needless pathfinding near the goal a Line Of Sight (LOS) pass is performed from the goal Sector. The idea being that if an actor moves into a field cell that has LOS then it no longer needs to follow the FlowFields and can instead directly path to the goal.
The LOS phase begins as a wavefront from the goal that interrogates the adjacent neighbouring field cells. If an adjacent cell is not marked as impasssable then it must have LOS to the goal and the value of the cell receives a wavefront cost plus the LOS bit flag. The wavefront then expands (whereby the wavefront cost increments by 1) to interrogate the adjacent cells of the neighbours and repeats until the wavefront cannot propagate any further.
 As the wavefront expands it may encounter an impassable field cell (a block box in the diagrams). This causes two things to happen:
First, wavefront expansion cannot continue in the direction of the impassable field cell so it is removed from being a candidate in the next round of wavefront propagation.
Second, if there is a vacant field cell next to the impassable field cell then this indicates a Corner. A Corner means that LOS will be blocked in a given direction and the Corner is recorded for stage 3, the integrated cost calculation.
As the wavefront expands it may encounter an impassable field cell (a block box in the diagrams). This causes two things to happen:
First, wavefront expansion cannot continue in the direction of the impassable field cell so it is removed from being a candidate in the next round of wavefront propagation.
Second, if there is a vacant field cell next to the impassable field cell then this indicates a Corner. A Corner means that LOS will be blocked in a given direction and the Corner is recorded for stage 3, the integrated cost calculation.
 By taking a vector from the starting goal to the corner we can then extend this vector to calculate what field cells lie along a line. The field cells on this line are stored as corners and are updated with the flag for WavefrontBlocked. Meaning that as LOS expands and propagates if a WavefrontBlocked cell is encountered then the cell is removed as a candidate in further LOS porpagation. This ensures that LOS cannot flow around impassable areas.
By taking a vector from the starting goal to the corner we can then extend this vector to calculate what field cells lie along a line. The field cells on this line are stored as corners and are updated with the flag for WavefrontBlocked. Meaning that as LOS expands and propagates if a WavefrontBlocked cell is encountered then the cell is removed as a candidate in further LOS porpagation. This ensures that LOS cannot flow around impassable areas.
 Any available LOS propagation continues until all possible cells are exhausted:
Any available LOS propagation continues until all possible cells are exhausted:
 Once the wavefront has exhausted expansion from either hitting the sector boundaries or from impassable cells/corners we can then calculate the actual integrated cost of the field.
### 3. Integrated Cost Calculation
From the Corners of an `IntegrationField` recorded previously we start a new series of wavefronts that radiate from the corners considering any adjacent field cells that have not been marked as LOS or impassable.
Once the wavefront has exhausted expansion from either hitting the sector boundaries or from impassable cells/corners we can then calculate the actual integrated cost of the field.
### 3. Integrated Cost Calculation
From the Corners of an `IntegrationField` recorded previously we start a new series of wavefronts that radiate from the corners considering any adjacent field cells that have not been marked as LOS or impassable.
 To calculate the cost of the cells in the field:
1. The valid ordinal neighbours of the corners are determined (one, none or many of North, East, South, West)
2. For each ordinal field cell lookup their `CostField` value
3. Add the `CostField` cost to the `IntegrationFields` cost of the current cell (at the corner the wavefront cost assigned was 4, assuming the `CostField` value of the adjacent cell is `1` then the integrated cost becomes `5`)
To calculate the cost of the cells in the field:
1. The valid ordinal neighbours of the corners are determined (one, none or many of North, East, South, West)
2. For each ordinal field cell lookup their `CostField` value
3. Add the `CostField` cost to the `IntegrationFields` cost of the current cell (at the corner the wavefront cost assigned was 4, assuming the `CostField` value of the adjacent cell is `1` then the integrated cost becomes `5`)
 4. Wavefront propagates to the next neighbours, find their ordinals and repeat adding their cost value to to the current cells integration cost to produce their cumulative integration cost, and repeat until the entire field is done
4. Wavefront propagates to the next neighbours, find their ordinals and repeat adding their cost value to to the current cells integration cost to produce their cumulative integration cost, and repeat until the entire field is done
 The end result effectively produces a gradient of high numbers to low numbers, a flow of sorts.
The end result effectively produces a gradient of high numbers to low numbers, a flow of sorts.
 For Sectors other than the goal the process is effectively the same where boundary portals are treated as corners and wave propagation exapaned.
NB: the following diagrams use smaller sector sizes and exclude LOS but demonstrate how integrated cost is accumulated and creates a gradient from portal to portal
From the `PortalGraph` we can get a path of `Portals` to guide the actor over several sectors to the desired sector, the `IntegrationField` of the goal sector has been calculated so next we "hop" through the boundary `Portals` working backwards from the goal sector to the actor sector (Portals are denoted as a purple shade) to produce a series of `IntegrationFields` for the chaining Sectors describing the flow movement.
For Sectors other than the goal the process is effectively the same where boundary portals are treated as corners and wave propagation exapaned.
NB: the following diagrams use smaller sector sizes and exclude LOS but demonstrate how integrated cost is accumulated and creates a gradient from portal to portal
From the `PortalGraph` we can get a path of `Portals` to guide the actor over several sectors to the desired sector, the `IntegrationField` of the goal sector has been calculated so next we "hop" through the boundary `Portals` working backwards from the goal sector to the actor sector (Portals are denoted as a purple shade) to produce a series of `IntegrationFields` for the chaining Sectors describing the flow movement.


 In terms of pathfinding the actor will favour flowing "downhill". From the position of the actor and looking at its field cell neighbours a smalller value in that sectors `IntegrationField` means a more favourable point for reaching the end goal, going from smaller to smaller values, basically a gradient flowing downhill to the destination.
This informs the basis of a `FlowField`.
As an example for a `30x30` world (manually calculated), goal at `0` with an actor at `A`, an `IntegrationField` set interrogating all sector `Portals` may produce a set of fields looking similar to:
In terms of pathfinding the actor will favour flowing "downhill". From the position of the actor and looking at its field cell neighbours a smalller value in that sectors `IntegrationField` means a more favourable point for reaching the end goal, going from smaller to smaller values, basically a gradient flowing downhill to the destination.
This informs the basis of a `FlowField`.
As an example for a `30x30` world (manually calculated), goal at `0` with an actor at `A`, an `IntegrationField` set interrogating all sector `Portals` may produce a set of fields looking similar to:
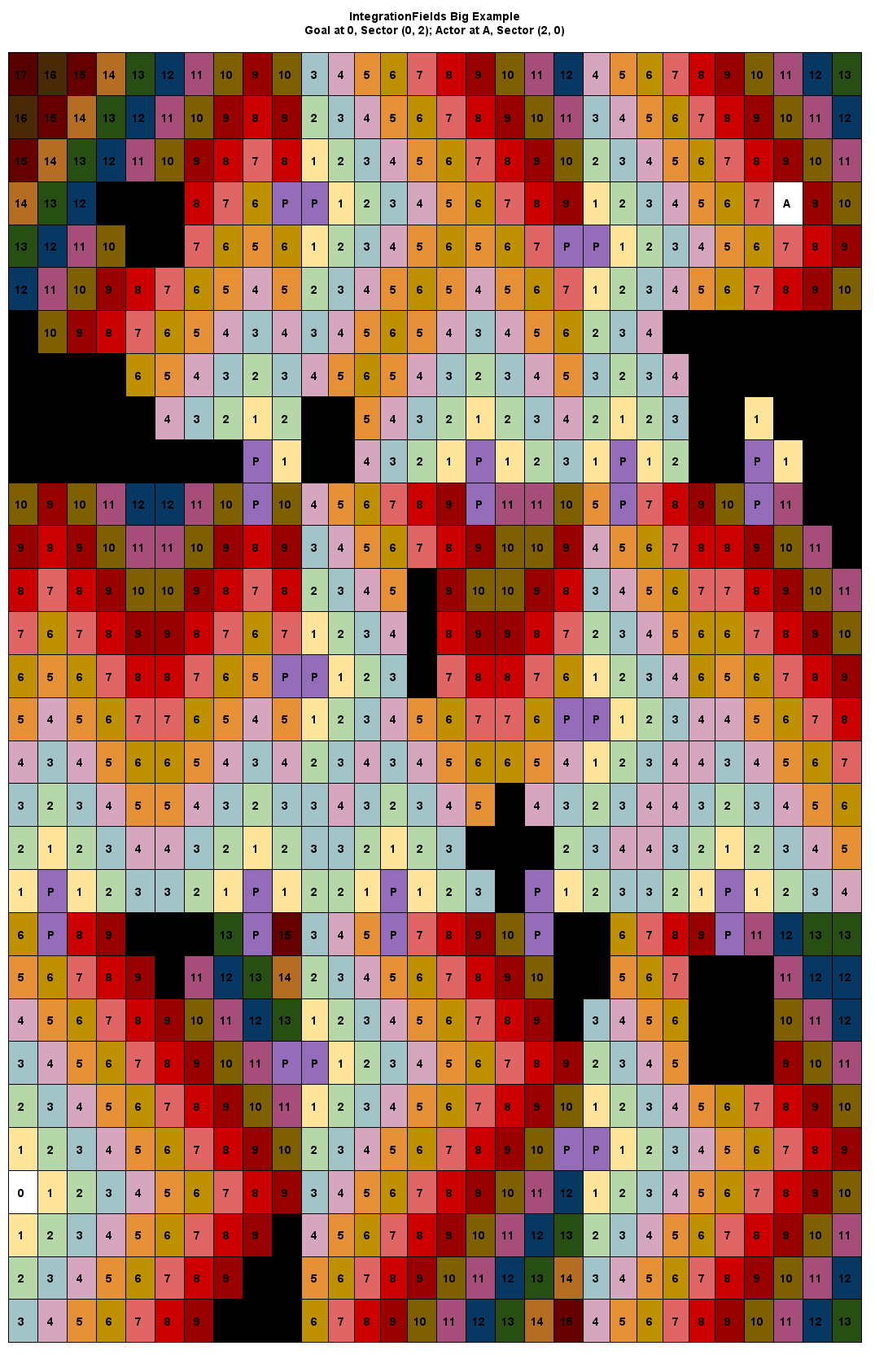 Notice the cool waves that propagate out from the goal!
Generating the fields for this path programmatically leads to:
Notice the cool waves that propagate out from the goal!
Generating the fields for this path programmatically leads to:
 From the `IntegrationFields` we can now build the final set of fields - `FlowFields`
From the `IntegrationFields` we can now build the final set of fields - `FlowFields`
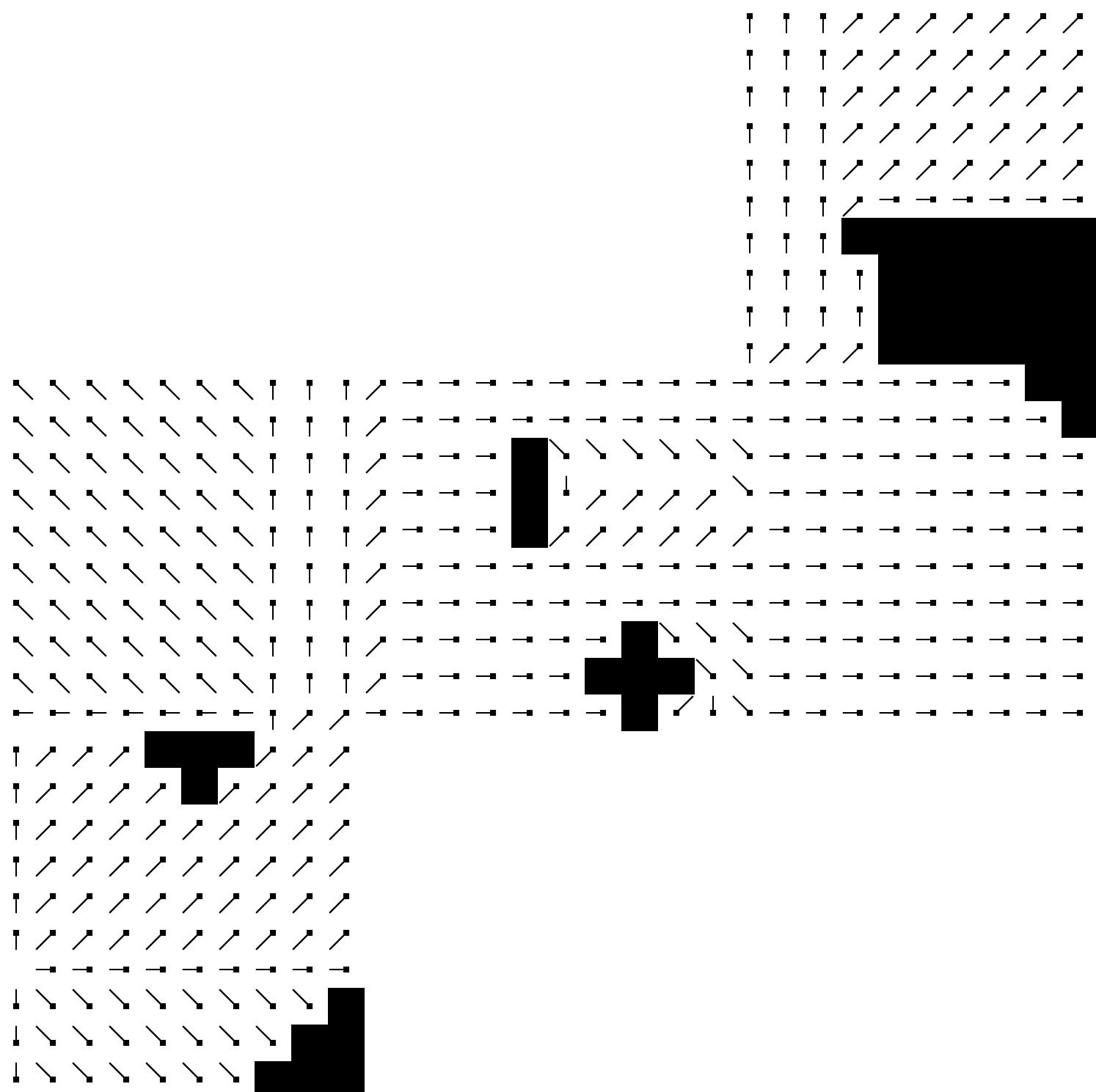 The thinner porition of each cell icon indicates the flow direction. The actor runs along the flow lines leading to the goal. This means for a group of actors they will flow towards the goal with a formation-like behaviour along the flow lines.
The thinner porition of each cell icon indicates the flow direction. The actor runs along the flow lines leading to the goal. This means for a group of actors they will flow towards the goal with a formation-like behaviour along the flow lines.
 The smaller actor on the left can evidently pass through the gap between the impassable terrain. On the right however the actor is much larger and as such when processing a `PathRequest` only routes with suitable clearance should be considered (otherwise with a collision system in place it'd just bump into the walls to the side and never make it through).
To handle this the overall `MapDimenions` component which defines the sizing of the various fields contains an `actor_scale` parameter. This scaling is determined by the actor size and unit-size of a cell within a field. For instance a Sector with pixel dimensions of `640x640` means that each cell in the `(m, n) -> (10, 10)` fields represents a pixel area of `64x64`, if an actor is larger than `64` pixels in width then a ratio between actor size and cell size is applied to 'grow' impassable cells to close off gaps that would be too small for the actor to path through.
In terms of what an actor 'sees' after requesting a route, the smaller actor on the left can path through the gap whereas the larger actor on the right would search for an alternate route:
The smaller actor on the left can evidently pass through the gap between the impassable terrain. On the right however the actor is much larger and as such when processing a `PathRequest` only routes with suitable clearance should be considered (otherwise with a collision system in place it'd just bump into the walls to the side and never make it through).
To handle this the overall `MapDimenions` component which defines the sizing of the various fields contains an `actor_scale` parameter. This scaling is determined by the actor size and unit-size of a cell within a field. For instance a Sector with pixel dimensions of `640x640` means that each cell in the `(m, n) -> (10, 10)` fields represents a pixel area of `64x64`, if an actor is larger than `64` pixels in width then a ratio between actor size and cell size is applied to 'grow' impassable cells to close off gaps that would be too small for the actor to path through.
In terms of what an actor 'sees' after requesting a route, the smaller actor on the left can path through the gap whereas the larger actor on the right would search for an alternate route:
 In a game with actors of multiple sizes you will want to create distinct entities from `FlowFieldTilesBundle` where each is configured to handle a certain size of actor.
```rust
#[derive(Component)]
struct ActorSmall
#[derive(Component)]
struct ActorLarge
fn setup () {
let map_length = 1920;
let map_depth = 1920;
let sector_resolution = 640;
let actor_size_small = 16.0;
cmds.spawn(FlowFieldTilesBundle::new(
map_length,
map_depth,
sector_resolution,
actor_size_small
)).insert(ActorSmall);
let actor_size_large = 78.0;
cmds.spawn(FlowFieldTilesBundle::new(
map_length,
map_depth,
sector_resolution,
actor_size_large
)).insert(ActorLarge);
}
fn system_navigation_small_actors(
actor_q: Query<&Actor, With
In a game with actors of multiple sizes you will want to create distinct entities from `FlowFieldTilesBundle` where each is configured to handle a certain size of actor.
```rust
#[derive(Component)]
struct ActorSmall
#[derive(Component)]
struct ActorLarge
fn setup () {
let map_length = 1920;
let map_depth = 1920;
let sector_resolution = 640;
let actor_size_small = 16.0;
cmds.spawn(FlowFieldTilesBundle::new(
map_length,
map_depth,
sector_resolution,
actor_size_small
)).insert(ActorSmall);
let actor_size_large = 78.0;
cmds.spawn(FlowFieldTilesBundle::new(
map_length,
map_depth,
sector_resolution,
actor_size_large
)).insert(ActorLarge);
}
fn system_navigation_small_actors(
actor_q: Query<&Actor, With