SeetaFace detection library for the Rust programming language
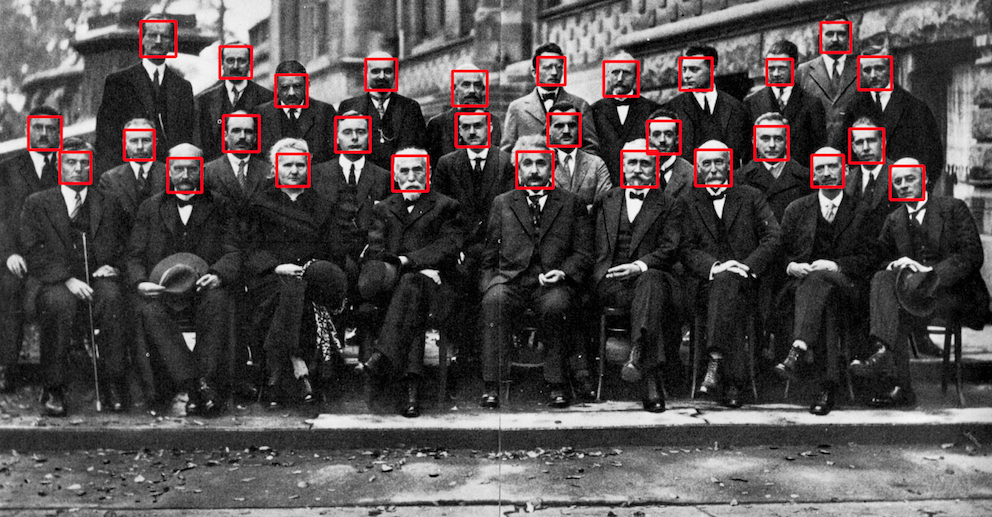 Example of demo program output
Example of demo program output




* **[SEETAFACE C++](https://github.com/seetaface/SeetaFaceEngine/tree/master/FaceDetection)** – Github repository for the original library
* **[PYTHON BINDINGS](https://github.com/torchbox/rustface-py)** – call Rustface from Python code
* **[LICENSE](https://github.com/atomashpolskiy/rustface/blob/master/LICENSE)** – licensed under permissive BSD 2-Clause
## About
SeetaFace Detection is an implementation of Funnel-Structured cascade, which is designed for **real-time** multi-view face detection. FuSt aims at a good trade-off between accuracy and speed by using a coarse-to-fine structure. It consists of multiple view-specific fast LAB cascade classifiers at early stages, followed by coarse Multilayer Perceptron (MLP) cascades at later stages. The final stage is one unified fine MLP cascade, processing all proposed windows in a centralized style.
[Read more...](https://github.com/seetaface/SeetaFaceEngine/tree/master/FaceDetection#seetaface-detection)
## Performance
You can run the criterion benchmarks using `cargo bench`.
### Using nightly Rust
The `nightly` branch contains a slightly (~20%) faster version of rustface. This speedup is made possible by using explicit SIMD intrinsics. If you want to use this branch, you need an older nightly toolchain.
```
rustup toolchain install nightly-2018-01-15
rustup default nightly-2018-01-15
```
Regarding the performance of the `nightly` branch: crude manual benchmarking showed that this nightly Rust version of SeetaFace is _slightly faster_ than the original C++ version. In this particular test the Rust version has been **4% faster on average** than its C++ counterpart. When using multiple threads and enabling LTO (link-time optimization), Rust performance is a tad better (I observe a **8% boost**):
```
Multi-threaded (Rayon threads set to 2)
LTO enabled
* Rustface *
samples (ms): 787,789,795,795,787,785,791,799,795,788
mean (ms): 791.1
stddev (ms): 4.39
```
## Usage example
```rust
extern crate rustface;
use rustface::{Detector, FaceInfo, ImageData};
fn main() {
let mut detector = rustface::create_detector("/path/to/model").unwrap();
detector.set_min_face_size(20);
detector.set_score_thresh(2.0);
detector.set_pyramid_scale_factor(0.8);
detector.set_slide_window_step(4, 4);
let mut image = ImageData::new(bytes, width, height);
for face in detector.detect(&mut image).into_iter() {
// print confidence score and coordinates
println!("found face: {:?}", face);
}
}
```
## How to build
The project is a library crate and also contains a runnable example for demonstration purposes.
Then just use the standard Cargo `build` command:
```
cargo build --release
```
## Run demo
Code for the demo is located in `examples/image_demo.rs` file. It performs face detection for a given image and saves the result into a file in the working directory.
The simplest way to run the demo is to use the `bin/test.sh` script:
```
./bin/test.sh
```
Please note that this library makes use of [Rayon](https://github.com/rayon-rs/rayon) framework to parallelize some computations. By default, **Rayon** spawns the same number of threads as the number of CPUs (logicals cores) available. Instead of making things faster, the penalty of switching between so many threads may severely hurt the performance, so it's strongly advised to keep the number of threads small by manually setting `RAYON_NUM_THREADS` environment variable.
```
# empirically found to be the sweet spot for the number of threads
export RAYON_NUM_THREADS=2
cargo run --release --example image_demo model/seeta_fd_frontal_v1.0.bin
```
Note that Rayon can be disabled entirely at compile time by providing the `--no-default-features` flag.
## TODO
* Use stable SIMD intrinsics when available
* Benchmark benefit of parallelisation. Compiler improvements may have reduced the relative benefit of parallel processing, especially when running on smaller images. Simplify where possible.
* Parallelize remaining CPU intensive loops
* Tests (it would make sense to start with an integration test for `Detector::detect`, based on the results retrieved from the original library)
## Authors
- Andrei Tomashpolskiy [@atomashpolskiy](https://github.com/atomashpolskiy)
_Original developer and maintainer_
- Jurriaan BW [@jjhbw](https://github.com/jjhbw)
_Contributor and chief maintainer_
- Ashley [@expenses](https://github.com/expenses)
_Contributor. Added the switch from OpenCV to [Image](https://crates.io/crates/image)._
This library is based on the following works:
- Face detection method described in the paper: _"Funnel-structured cascade for multi-view face detection with alignment awareness, Shuzhe Wu, Meina Kan, Zhenliang He, Shiguang Shan, Xilin Chen. In Neurocomputing (under review)"_
- [original C++ implementation](https://github.com/seetaface/SeetaFaceEngine/tree/master/FaceDetection)
## License
Original SeetaFace Detection is released under the [BSD 2-Clause license](https://github.com/seetaface/SeetaFaceEngine/blob/master/LICENSE). This project is a derivative work and uses the same license as the original.