hierarchical_pathfinding
| Crates.io | hierarchical_pathfinding |
| lib.rs | hierarchical_pathfinding |
| version | 0.5.0 |
| created_at | 2019-03-30 11:12:43.427023+00 |
| updated_at | 2021-08-08 17:23:22.077209+00 |
| description | Quickly approximate Paths on a Grid |
| homepage | |
| repository | https://github.com/mich101mich/hierarchical_pathfinding |
| max_upload_size | |
| id | 124755 |
| size | 159,225 |
 Malte Hillmann (mich101mich)
Malte Hillmann (mich101mich)
documentation
README
Hierarchical Pathfinding
A Rust crate to find Paths on a Grid using HPA* (Hierarchical Pathfinding A*) and Hierarchical Dijkstra.
![]()
Description
Provides a fast algorithm for finding Paths on a Grid-like structure by caching segments of Paths to form a Node Graph. Finding a Path in that Graph is a lot faster than on the Grid itself, but results in Paths that are slightly worse than the optimal Path.
Implementation based on the Paper "Near Optimal Hierarchical Path-Finding".
Advantages
- Finding a Path is a lot faster compared to regular algorithms (A*, Dijkstra)
- It is always correct: A Path is found if and only if it exists
- This means that Hierarchical Pathfinding can be used as Heuristic to check if a Path exists and how long it will roughly be (upper bound)
Disadvantages
- Paths are slightly worse (negligible in most cases)
- Creating the cache takes time (only happens once at the start)
- Changes to the Grid require updating the cache
- Whenever a Tile within a Chunk changes, that entire Chunk needs to recalculate its Paths. Performance depends on Chunk size (configurable) and the number of Nodes in a Chunk
Use Case
Finding Paths on a Grid is an expensive Operation. Consider the following Setup:
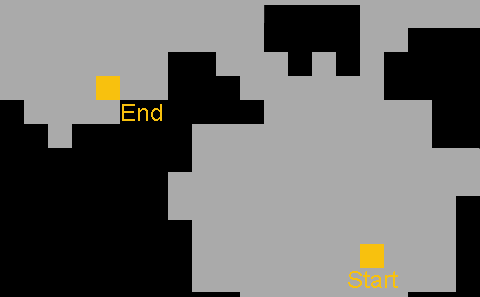
In order to calculate a Path from Start to End using regular A*, it is necessary to check a lot of Tiles:
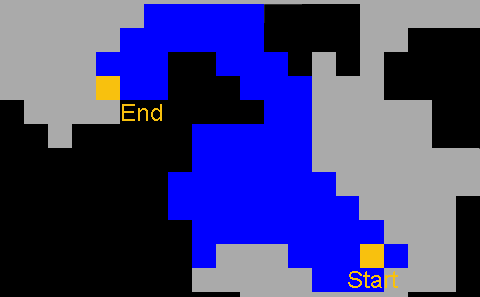
(This is simply a small example, longer Paths require a quadratic increase in Tile checks, and unreachable Goals require the check of every single Tile)
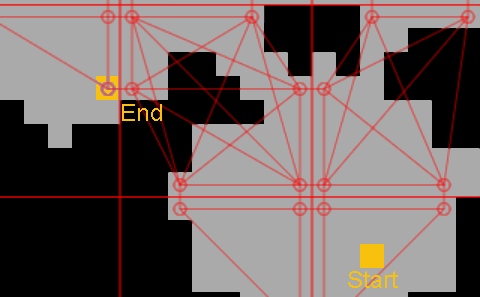
The Solution that Hierarchical Pathfinding provides is to divide the Grid into Chunks and cache the Paths between Chunk entrances as a Graph of Nodes:
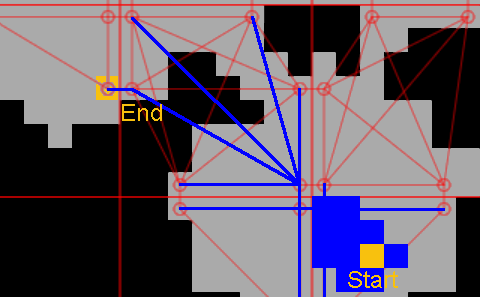
This allows Paths to be generated by connecting the Start and End to the Nodes within the Chunk and using the Graph for the rest:
Example
use hierarchical_pathfinding::prelude::*;
let mut pathfinding = PathCache::new(
(width, height), // the size of the Grid
|(x, y)| walking_cost(x, y), // get the cost for walking over a Tile
ManhattanNeighborhood::new(width, height), // the Neighborhood
PathCacheConfig::with_chunk_size(3), // config
);
let start = (0, 0);
let goal = (4, 4);
// find_path returns Some(Path) on success
let path = pathfinding.find_path(
start,
goal,
|(x, y)| walking_cost(x, y),
);
if let Some(path) = path {
println!("Number of steps: {}", path.length());
println!("Total Cost: {}", path.cost());
for (x, y) in path {
println!("Go to {}, {}", x, y);
}
}