nv-flip
| Crates.io | nv-flip |
| lib.rs | nv-flip |
| version | 0.1.2 |
| created_at | 2023-06-04 04:13:01.306575+00 |
| updated_at | 2023-07-16 03:35:23.449506+00 |
| description | High-Level bindings to Nvidia Labs's ꟻLIP image comparison and error visualization library |
| homepage | |
| repository | https://github.com/gfx-rs/nv-flip-rs |
| max_upload_size | |
| id | 881978 |
| size | 30,101 |
 Connor Fitzgerald (cwfitzgerald)
Connor Fitzgerald (cwfitzgerald)
documentation
README
nv-flip
bindings to Nvidia Labs's ꟻLIP image comparison and error visualization library.
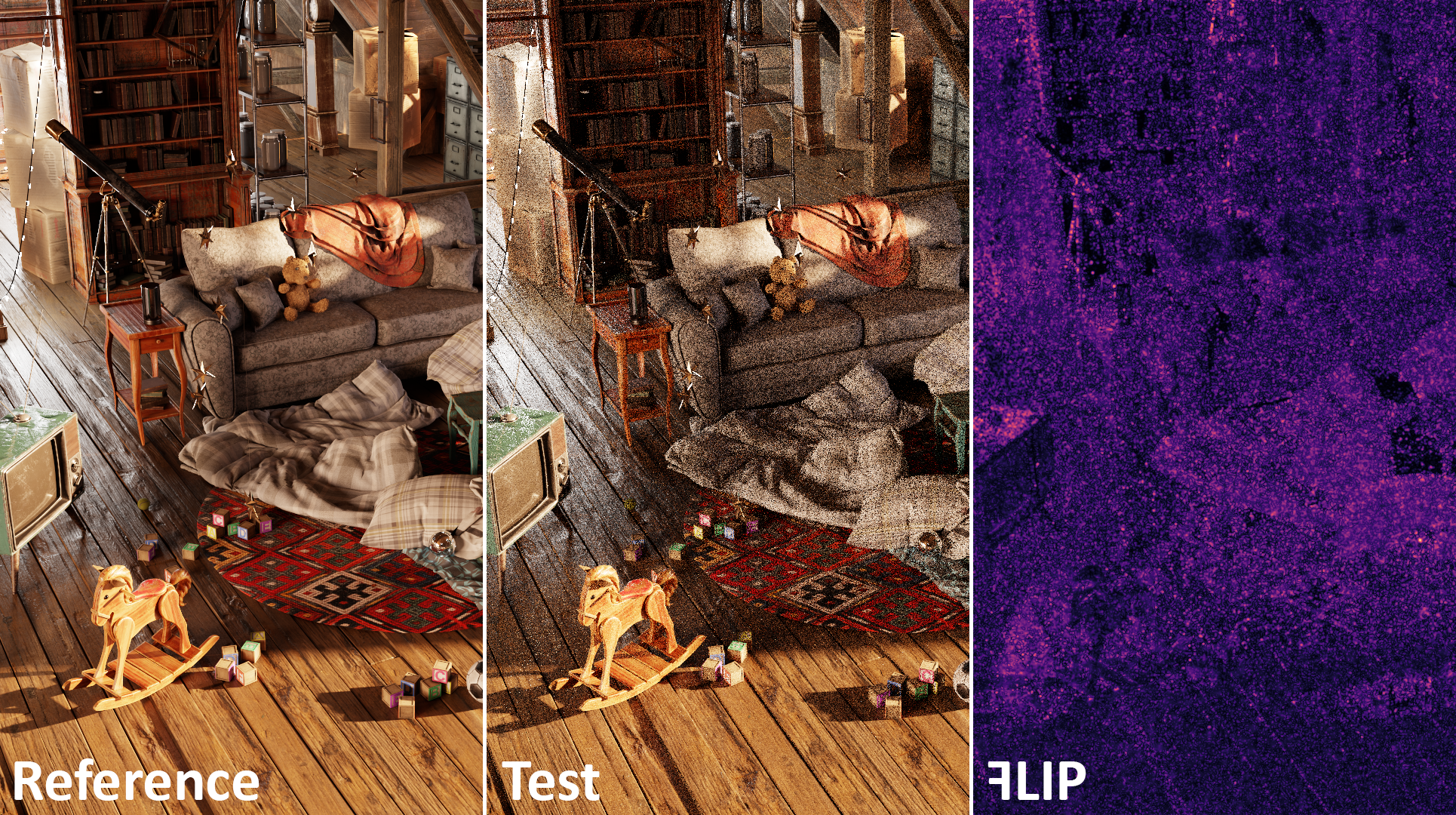
This library allows you to visualize and reason about the human-noticable differences between rendered images. Especially when comparing images that are noisy or other small differences, FLIP's comparison can be more meaningful than a simple pixel-wise comparison.
In order to keep a small dependency closure, this crate does not depend on image,
but interop is simple.
Example
// First we load the "reference image". This is the image we want to compare against.
//
// We make sure to turn the image into RGB8 as FLIP doesn't deal with alpha.
let ref_image_data = image::open("../etc/tree-ref.png").unwrap().into_rgb8();
let ref_image = nv_flip::FlipImageRgb8::with_data(
ref_image_data.width(),
ref_image_data.height(),
&ref_image_data
);
// We then load the "test image". This is the image we want to compare to the reference.
let test_image_data = image::open("../etc/tree-test.png").unwrap().into_rgb8();
let test_image = nv_flip::FlipImageRgb8::with_data(
test_image_data.width(),
test_image_data.height(),
&test_image_data
);
// We now run the comparison. This will produce a "error map" that that is the per-pixel
// visual difference between the two images between 0 and 1.
//
// The last parameter is the number of pixels per degree of visual angle. This is used
// to determine the size of imperfections that can be seen. See the `pixels_per_degree`
// for more information. By default this value is 67.0.
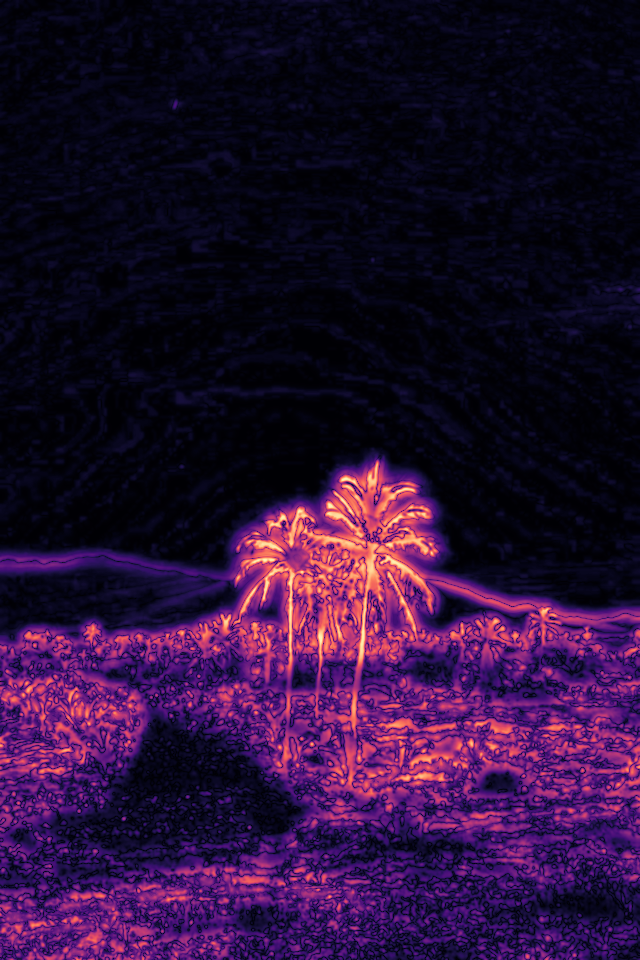
let error_map = nv_flip::flip(ref_image, test_image, nv_flip::DEFAULT_PIXELS_PER_DEGREE);
// We can now visualize the error map using a LUT that maps the error value to a color.
let visualized = error_map.apply_color_lut(&nv_flip::magma_lut());
// Finally we can the final image into an `image` crate image and save it.
let image = image::RgbImage::from_raw(
visualized.width(),
visualized.height(),
visualized.to_vec()
).unwrap();
// We can get statistics about the error map by using their "Pool" type,
// which is essentially a weighted histogram.
let mut pool = nv_flip::FlipPool::from_image(&error_map);
// These are the same statistics shown by the command line.
//
// The paper's writers recommend that, if you are to use a single number to
// represent the error, they recommend the mean.
println!("Mean: {}", pool.mean());
println!("Weighted median: {}", pool.get_percentile(0.5, true));
println!("1st weighted quartile: {}", pool.get_percentile(0.25, true));
println!("3rd weighted quartile: {}", pool.get_percentile(0.75, true));
println!("Min: {}", pool.min_value());
println!("Max: {}", pool.max_value());
The result of this example looks like this:
| Reference | ⠀⠀Test⠀⠀ | ⠀Result⠀ |
|---|---|---|
 |
 |
 |
License
The binding and rust interop code is tri-licensed under MIT, Apache-2.0, and ZLib.
The ꟻLIP library itself is licensed under the BSD-3-Clause license.
The example images used are licensed under the Unsplash License.
License: MIT OR Apache-2.0 OR Zlib