rtc
| Crates.io | rtc |
| lib.rs | rtc |
| version | 0.8.2 |
| created_at | 2021-01-17 03:18:22.327273+00 |
| updated_at | 2026-01-24 00:37:46.279506+00 |
| description | Sans-I/O WebRTC implementation in Rust |
| homepage | https://webrtc.rs |
| repository | https://github.com/webrtc-rs/rtc |
| max_upload_size | |
| id | 343014 |
| size | 2,013,234 |
 Rusty Rain (rainliu)
Rusty Rain (rainliu)
documentation
README

![]()
![]()


![]()


Sans-I/O WebRTC implementation in Rust
Sponsored with 💖 by
Gold Sponsors:

Silver Sponsors:
![]()
![]()
Bronze Sponsors:
AdrianEddy
Table of Content
Overview
RTC is a pure Rust implementation of WebRTC using a sans-I/O architecture. Unlike traditional WebRTC libraries, RTC separates protocol logic from I/O operations, giving you complete control over networking, threading, and async runtime integration.
What is Sans-I/O?
Sans-I/O (without I/O) is a design pattern where the library handles protocol logic but you control all I/O operations. Instead of the library performing network reads and writes directly, you feed it network data and it tells you what to send.
Benefits:
- 🚀 Runtime Independent - Works with tokio, async-std, smol, or blocking I/O
- 🎯 Full Control - You control threading, scheduling, and I/O multiplexing
- 🧪 Testable - Protocol logic can be tested without real network I/O
- 🔌 Flexible - Easy integration with existing networking code
Sans-I/O Event Loop Pattern
The sans-I/O architecture uses a simple event loop with six core methods:
Core API Methods
poll_write()- Get outgoing network packets to send via UDPpoll_event()- Process connection state changes and notificationspoll_read()- Get incoming application messages (RTP, RTCP, Data)poll_timeout()- Get next timer deadline for retransmissions/keepaliveshandle_read()- Feed incoming network packets into the connectionhandle_timeout()- Notify about timer expiration
Additional methods for external control:
handle_write()- Queue application messages (RTP/RTCP/Data) for sendinghandle_event()- Inject external events into the connection
Event Loop Example
use rtc::peer_connection::RTCPeerConnection;
use rtc::peer_connection::configuration::RTCConfigurationBuilder;
use rtc::peer_connection::event::{RTCPeerConnectionEvent, RTCTrackEvent};
use rtc::peer_connection::state::RTCPeerConnectionState;
use rtc::peer_connection::message::RTCMessage;
use rtc::peer_connection::sdp::RTCSessionDescription;
use rtc::shared::{TaggedBytesMut, TransportContext, TransportProtocol};
use rtc::sansio::Protocol;
use std::time::{Duration, Instant};
use tokio::net::UdpSocket;
use bytes::BytesMut;
#[tokio::main]
async fn main() -> Result<(), Box<dyn std::error::Error>> {
// Setup peer connection
let config = RTCConfigurationBuilder::new().build();
let mut pc = RTCPeerConnection::new(config)?;
// Signaling: Create offer and set local description
let offer = pc.create_offer(None)?;
pc.set_local_description(offer.clone())?;
// TODO: Send offer.sdp to remote peer via your signaling channel
// signaling_channel.send_offer(&offer.sdp).await?;
// TODO: Receive answer from remote peer via your signaling channel
// let answer_sdp = signaling_channel.receive_answer().await?;
// let answer = RTCSessionDescription::answer(answer_sdp)?;
// pc.set_remote_description(answer)?;
// Bind UDP socket
let socket = UdpSocket::bind("0.0.0.0:0").await?;
let local_addr = socket.local_addr()?;
let mut buf = vec![0u8; 2000];
'EventLoop: loop {
// 1. Send outgoing packets
while let Some(msg) = pc.poll_write() {
socket.send_to(&msg.message, msg.transport.peer_addr).await?;
}
// 2. Handle events
while let Some(event) = pc.poll_event() {
match event {
RTCPeerConnectionEvent::OnConnectionStateChangeEvent(state) => {
println!("Connection state: {state}");
if state == RTCPeerConnectionState::Failed {
return Ok(());
}
}
RTCPeerConnectionEvent::OnTrack(RTCTrackEvent::OnOpen(init)) => {
println!("New track: {}", init.track_id);
}
_ => {}
}
}
// 3. Handle incoming messages
while let Some(message) = pc.poll_read() {
match message {
RTCMessage::RtpPacket(track_id, packet) => {
println!("RTP packet on track {track_id}");
}
RTCMessage::DataChannelMessage(channel_id, msg) => {
println!("Data channel message");
}
_ => {}
}
}
// 4. Handle timeouts
let timeout = pc.poll_timeout()
.unwrap_or(Instant::now() + Duration::from_secs(86400));
let delay = timeout.saturating_duration_since(Instant::now());
if delay.is_zero() {
pc.handle_timeout(Instant::now())?;
continue;
}
// 5. Multiplex I/O
tokio::select! {
_ = stop_rx.recv() => {
break 'EventLoop,
}
_ = tokio::time::sleep(delay) => {
pc.handle_timeout(Instant::now())?;
}
Ok(message) = message_rx.recv() => {
pc.handle_write(message)?;
}
Ok(event) = event_rx.recv() => {
pc.handle_event(event)?;
}
Ok((n, peer_addr)) = socket.recv_from(&mut buf) => {
pc.handle_read(TaggedBytesMut {
now: Instant::now(),
transport: TransportContext {
local_addr,
peer_addr,
ecn: None,
transport_protocol: TransportProtocol::UDP,
},
message: BytesMut::from(&buf[..n]),
})?;
}
}
}
pc.close()?;
Ok(())
}
Features
- ✅ ICE (Interactive Connectivity Establishment) - NAT traversal with STUN/TURN
- ✅ DTLS (Datagram Transport Layer Security) - Encryption for media and data
- ✅ SCTP (Stream Control Transmission Protocol) - Reliable data channels
- ✅ RTP/RTCP - Real-time media transport and control
- ✅ SDP (Session Description Protocol) - Offer/answer negotiation
- ✅ Data Channels - Bidirectional peer-to-peer data transfer
- ✅ Media Tracks - Audio/video transmission
- ✅ Trickle ICE - Progressive candidate gathering
- ✅ Simulcast & SVC - Simulcast and scalable video coding
Examples
The repository includes comprehensive examples demonstrating various use cases:
- data-channels-offer-answer - Complete data channel setup with signaling
- reflect - Echo server that reflects media back to sender
- save-to-disk-vpx - Receive and save VP8/VP9 video
- play-from-disk-vpx - Send VP8/VP9 video from disk
- simulcast - Receive 3 simulcast encodings in one track
- broadcast - Broadcast a video to multiple peers
- stats - Gives statistical information about a PeerConnection
Run an example:
cargo run --example data-channels-answer
Architecture
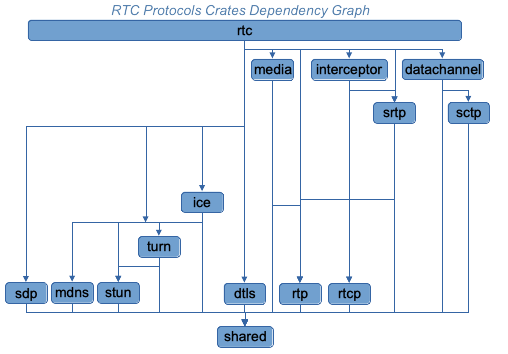
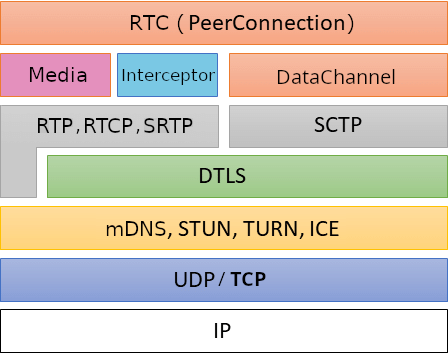
RTC is built from composable crates, each implementing a specific protocol:
RTC Crates
 RTC
RTC
Media Interceptor
Interceptor DataChannel
DataChannel
RTP RTCP
RTCP SRTP
SRTP SCTP
SCTP
DTLS
mDNS STUN
STUN TURN
TURN ICE
ICE
SDP Shared
Shared
Dependency Graph
Protocol Stack
Common Use Cases
Data Channels
use rtc::data_channel::RTCDataChannelInit;
fn example(mut pc: RTCPeerConnection) -> Result<(), Box<dyn std::error::Error>> {
// Create a data channel
let init = RTCDataChannelInit {
ordered: true,
max_retransmits: None,
..Default::default()
};
let mut dc = pc.create_data_channel("my-channel", Some(init))?;
// Send data
dc.send_text("Hello, WebRTC!")?;
Ok(())
}
Media Tracks
use rtc::media_stream::MediaStreamTrack;
use rtc::rtp_transceiver::rtp_sender::{RTCRtpCodec, RtpCodecKind};
fn example(mut pc: RTCPeerConnection) -> Result<(), Box<dyn std::error::Error>> {
// Create a video track
let track = MediaStreamTrack::new(
"stream-id".to_string(),
"track-id".to_string(),
"Camera".to_string(),
RtpCodecKind::Video,
vec![RTCRtpEncodingParameters {
rtp_coding_parameters: RTCRtpCodingParameters {
ssrc: Some(ssrc),
..Default::default()
},
codec: RTCRtpCodec::default(),
..Default::default()
}],
);
// Add to peer connection
let sender_id = pc.add_track(track)?;
Ok(())
}
Signaling
WebRTC requires an external signaling channel (e.g., WebSocket, HTTP) to exchange offers and answers:
fn example(mut pc: RTCPeerConnection) -> Result<(), Box<dyn std::error::Error>> {
// Create and send offer
let offer = pc.create_offer(None)?;
pc.set_local_description(offer.clone())?;
// Send offer.sdp via your signaling channel
// Receive and apply answer
// let answer = receive_answer_from_signaling()?;
// pc.set_remote_description(answer)?;
Ok(())
}
Specification Compliance
This implementation follows these specifications:
- W3C WebRTC 1.0 - Main WebRTC API specification
- RFC 8829 - JSEP: JavaScript Session Establishment Protocol
- RFC 8866 - SDP: Session Description Protocol
- RFC 8445 - ICE: Interactive Connectivity Establishment
- RFC 6347 - DTLS: Datagram Transport Layer Security
- RFC 9260 - SCTP: Stream Control Transmission Protocol
- RFC 8831 - WebRTC Data Channels
- RFC 3550 - RTP: Real-time Transport Protocol
- RFC 3711 - SRTP: Secure Real-time Transport Protocol
Documentation
- API Documentation - Complete API reference
- Examples - Working code examples
- Sans-I/O Pattern - Detailed explanation of the sans-I/O design
- WebRTC for the Curious - Comprehensive WebRTC guide
Building and Testing
# Build the library
cargo build
# Run tests
cargo test
# Build documentation
cargo doc --open
# Run examples
cargo run --example data-channels-answer
Contributing
Contributions are welcome! Please feel free to submit a Pull Request.
License
This project is licensed under either of:
- MIT License (LICENSE-MIT or http://opensource.org/licenses/MIT)
- Apache License, Version 2.0 (LICENSE-APACHE or http://www.apache.org/licenses/LICENSE-2.0)
at your option.
Acknowledgments
Special thanks to all contributors and the WebRTC-rs community for making this project possible.