viewercloud
| Crates.io | viewercloud |
| lib.rs | viewercloud |
| version | 0.2.1 |
| created_at | 2020-12-03 00:07:21.842187+00 |
| updated_at | 2020-12-03 00:31:03.102677+00 |
| description | Cross-platform 3D viewer to display autonomous driving poincloud datasets and annotations |
| homepage | https://github.com/ThomAub/viewercloud |
| repository | https://github.com/ThomAub/viewercloud |
| max_upload_size | |
| id | 319096 |
| size | 582,546 |
 Thomas (ThomAub)
Thomas (ThomAub)
documentation
README
Viewercloud
Viewercloud is a library and also a cli to read and display Pointcloud.
It was initially used to display KITTI pointcloud.
However it was also tested on the Lyft Level 5 Dataset pointcloud.
It will also be able to display the 3D annotations and the 3D BoundingBox computed by your favorite algorithm.
Viewercloud will open a openGL window to display the pointcloud. Press qto close.
It can also take a screen shot of the current view to save as png. Press s take screenshot.
Python Usage
You can install pyviewercloud the python bindings to viewercloud thanks to Pyo3 and Pyo3-numpy
poetry add pyviewercloud
pip install pyviewercloud
import numpy as np
import pyviewercloud as pyviewer
# Create a new viewer with a window size 1200x1800.
viewer = pyviewer.PointcloudViewer(1200, 1800, 15000)
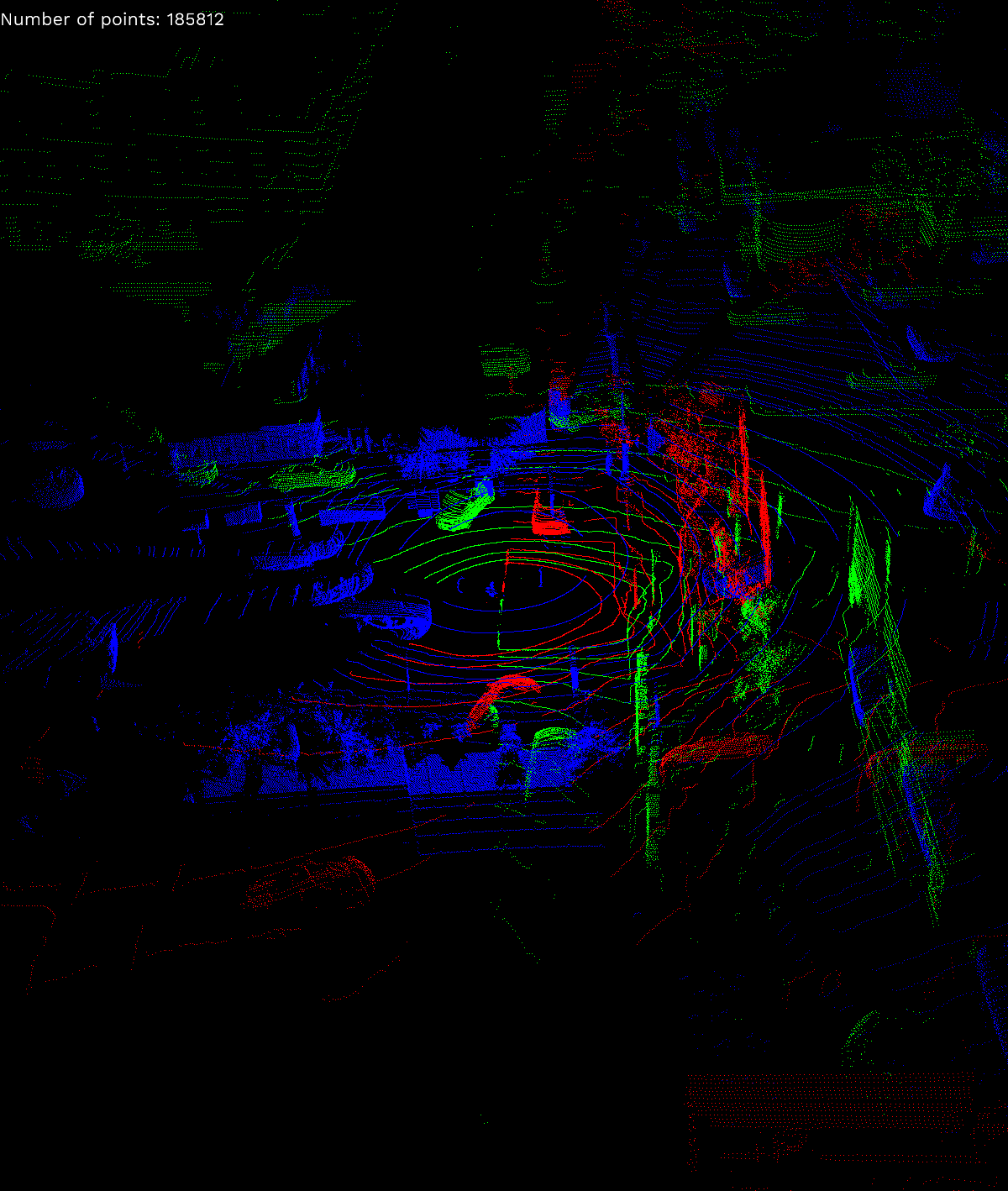
# Load some pointcloud from the lyft perception dataset
# Currently only support pointcloud as numpy.ndarray Nx3 in np.float32
lyft_point_cloud_1 = np.fromfile("tests/data/lyft/host-a101_lidar0_1241893239502712366.bin", dtype=np.float32).reshape((-1, 5))[:,:3]
lyft_point_cloud_2= np.fromfile("tests/data/lyft/host-a101_lidar1_1241893239502712366.bin", dtype=np.float32).reshape((-1, 5))[:,:3]
lyft_point_cloud_3= np.fromfile("tests/data/lyft/host-a101_lidar2_1241893239502712366.bin", dtype=np.float32).reshape((-1, 5))[:,:3]
# Add them one by one to the viewer to have different color
viewer.add_pointcloud(lyft_point_cloud_1, [255, 0, 0])
viewer.add_pointcloud(lyft_point_cloud_2, [0, 0, 255])
viewer.add_pointcloud(lyft_point_cloud_3, [0, 255, 0])
# You can now display the window
viewer.show()
import numpy as np
import pyviewercloud as pyviewer
# Create a new viewer with a window size 1200x1800.
viewer = pyviewer.PointcloudViewer(1200, 1800, 15000)
# Load some pointcloud from the kitti dataset
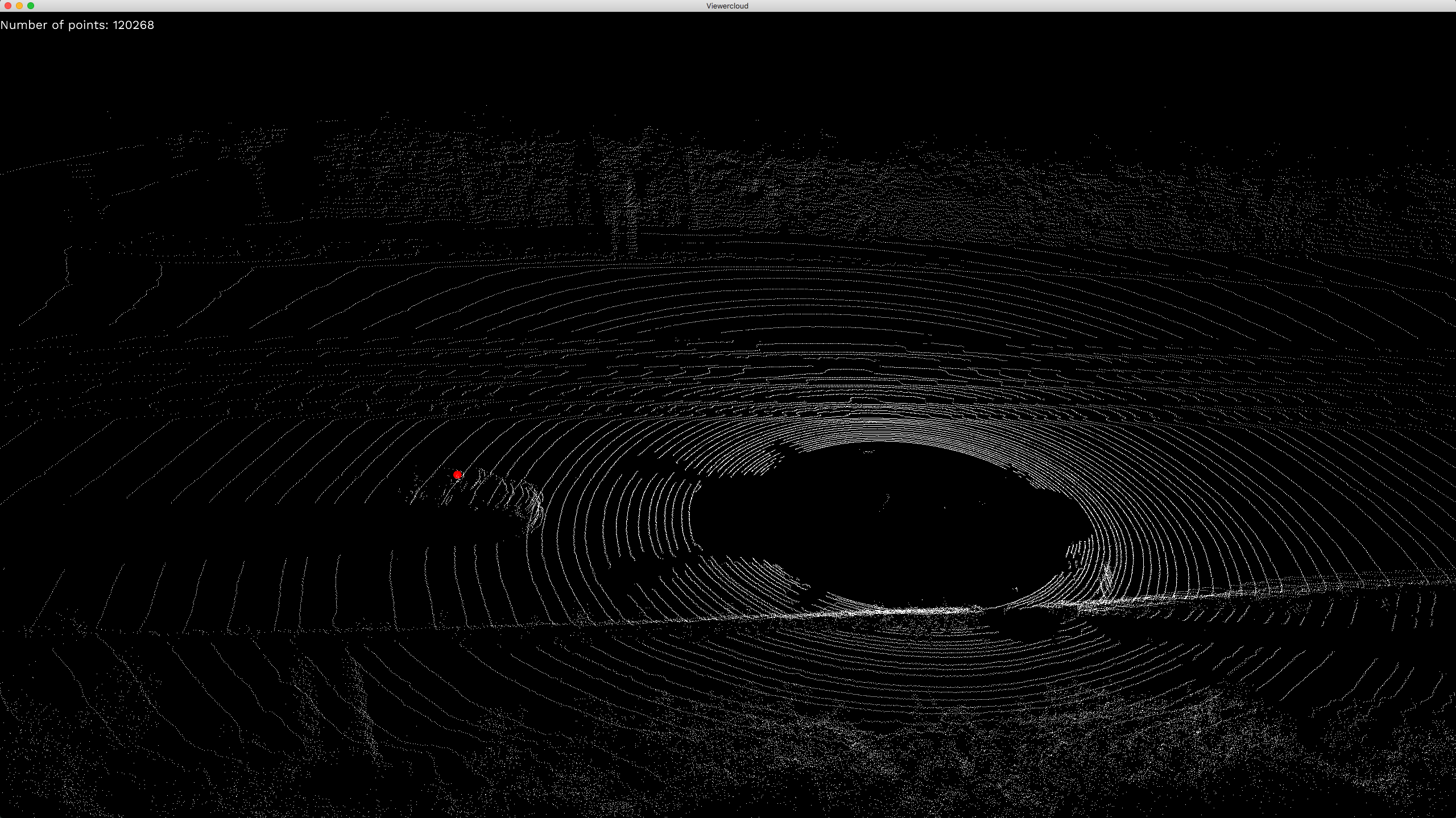
kitti_point_cloud = np.fromfile("tests/data/kitti/velodyne/000001.bin", dtype=np.float32).reshape((-1, 4))[:,:3]
viewer.add_pointcloud(kitti_point_cloud, [255, 255, 255])
# Add some centroids to have the same color.
# Currently only support centroids as numpy.ndarray Nx3 in np.float32
centroids = np.array([[-11.5,0,-0.8]]).astype(np.float32)
viewer.add_centroid(centroids, [255, 0, 0])
viewer.show()
CLI Usage
> viewercloud --help
viewercloud 0.2.1
Thomaub <github.thomaub@gmail.com>
Display KITTI 3D Pointcloud with annotations and your model inferences
USAGE:
viewercloud <pointcloud-file> [ARGS]
ARGS:
<pointcloud-file> Path to the kitti Pointcloud .bin or .txt file
<annotations-file> Path to the kitti 3D annotation .txt file
<inferences-file> Path to your model inferences .json file
FLAGS:
-h, --help Prints help information
-V, --version Prints version information
Build
cargo build --release
It will be possible to download from github release and brew.